Ardumower Mini
Aus www.wiki.ardumower.de

Inhaltsverzeichnis
Abstract
This page describes the 'Ardumower Mini' that can be used to implement a full Ardumower for indoor software development and
that you can purchase via the shop ![]()
Needed parts
Pictures

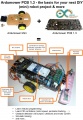
Ardumower Mini and PCB 1.3
Ardumwower Mini Poster

Videos
- Ardumower Mini and PCB 1.3
- Ardumower Mini
- Ardumower mini tracking perimeter wire
- Project LF: lane-by-lane mowing (Gyro+odometry)
- Project LF : robot position tracking on map
- Project LF: particle filter while mowing
- Project LF: robot position estimation via particle filter
- Project LF, milestone1 (working µC, perimeter, coil, motors, buzzer, LCD)
Steps
The Ardumower Mini can run the same software as the 'big Ardumower'. For the PCB, it's recommended to use PCB 1.3.
NOTE: Do not use more than 7 volt to operate the mini DC motors!
For further building instructions, see PCB1.3 and for uploading the software, see Azurit Firmware.