Echtzeit-Uhr: Unterschied zwischen den Versionen
(Die Seite wurde neu angelegt: „ == '''Realtime clock (RTC)''' == The robot requires a clock, so that it can start mowing automatically at certain time intervals (timer). A realtime clock…“) |
(→Realtime clock (RTC)) |
||
| Zeile 1: | Zeile 1: | ||
| − | == ''' | + | == '''Echtzeit-Uhr (RTC)''' == |
| − | + | Damit der Roboter automatisch zu unterschiedlichen Zeitintervallen mit dem Mähen beginnen kann, benötigt er eine interne Uhr.(Timer). | |
| − | + | eine Echtzeituhr (RTC) liefert ständig die aktuelle Zeit (Minute, Stunde) und das aktuelle Datum (Wochentag, Tag, Monat, Jahr).Mit Hilfe der eingebauten Batterie läuft die Uhrzeit weiter auch wenn der Roboter ausgeschaltet ist. | |
| − | + | Zusätzlich enthält das RTC-Modul noch einen EEPROM-Speicher (nicht flüchtigen Speicher), der 4k Benutzerdaten dauerhaft speichern kann. | |
Example: DS1307 | Example: DS1307 | ||
<gallery> | <gallery> | ||
| − | File: ds1307.jpg | | + | File: ds1307.jpg | DS1307 |
| − | File: ds1307_schematics.jpg | | + | File: ds1307_schematics.jpg | DS1307_Schaltbild |
</gallery> | </gallery> | ||
Version vom 14. Juli 2015, 13:18 Uhr
Inhaltsverzeichnis
Echtzeit-Uhr (RTC)
Damit der Roboter automatisch zu unterschiedlichen Zeitintervallen mit dem Mähen beginnen kann, benötigt er eine interne Uhr.(Timer).
eine Echtzeituhr (RTC) liefert ständig die aktuelle Zeit (Minute, Stunde) und das aktuelle Datum (Wochentag, Tag, Monat, Jahr).Mit Hilfe der eingebauten Batterie läuft die Uhrzeit weiter auch wenn der Roboter ausgeschaltet ist.
Zusätzlich enthält das RTC-Modul noch einen EEPROM-Speicher (nicht flüchtigen Speicher), der 4k Benutzerdaten dauerhaft speichern kann.
Example: DS1307

DS1307
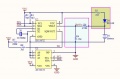
DS1307_Schaltbild


Wiring
The RTC module is connected on the I2C bus of the Arduino Mega (in parallel with any other I2C modules).
DS1307 Module SDA — Arduino SDA Pin DS1307 Module SCL — Arduino SCL Pin DS1307 Module VCC (+5V) — Arduino VCC (+5V) DS1307 Module GND — Arduino GND
Note
If you experience communication problems when using multiple I2C modules on one I2C bus, it is recommended to reduce the length of the cables.
Timer
On the robot, several timers can be programmed (via Android pfodApp). For each timer, you can define a time interval ('time windows') for the desired days. As long as the actual time is within any time window, the robot can freely mow, charge, mow, charge etc.
Example:
Timer 1: 08:00 - 13:00 Monday, Thuesday, Wednesday
Timer 2: 14:00 - 16:00 every day
Timer 3: off
Timer 4: off