PID control: Unterschied zwischen den Versionen
Aus www.wiki.ardumower.de
(→PID controller) |
(→PID controller) |
||
| Zeile 11: | Zeile 11: | ||
Proportional, Integral and Derivative (PID) controller concept: | Proportional, Integral and Derivative (PID) controller concept: | ||
| − | P : | + | P : Determines how aggressively the PID reacts to the current amount of error (Proportional) |
| − | D : to | + | D : Determines how aggressively the PID reacts to the change in error (Derivative) |
| − | I : | + | I : Determines how aggressively the PID reacts to error over time (Integral) |
<gallery> | <gallery> | ||
Version vom 7. Juli 2015, 21:59 Uhr
Abstract
Ardumower uses a digital PID controller for
- heading/course tracking
- perimeter tracking
- motor speed control
- ...
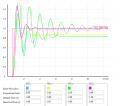
PID controller
Proportional, Integral and Derivative (PID) controller concept:
P : Determines how aggressively the PID reacts to the current amount of error (Proportional) D : Determines how aggressively the PID reacts to the change in error (Derivative) I : Determines how aggressively the PID reacts to error over time (Integral)
Examples

Velocity PID
The standard form is most used for position control. If you derivate the standard form, you obtain the velocity form:

velocity PID
