The soldering of the sender will be described.
There are two options soldering the sender:
a) Use the DC/DC Converter for Vin and GND of the MC33926 motor driver. Here you solder two pins to Vin and GND and connect the pins with the sender board. This is the default Ardumower configuration.
b) Use an external powersupply for Vin and GND of the MC33926 motor driver. Then you solder three terminal connectors on the motordriver. Vin and GND of the motor driver are not connected with the sender board. With this configuration you can adapt the voltage for the perimeter signal in a wider range. 5V to 24V for example and increase the current for a stronger perimeter signal.
In the last pictures a) and b) will be referenced.
The potentiometers will not be soldered because they have no function. If you want to install them you can do this.

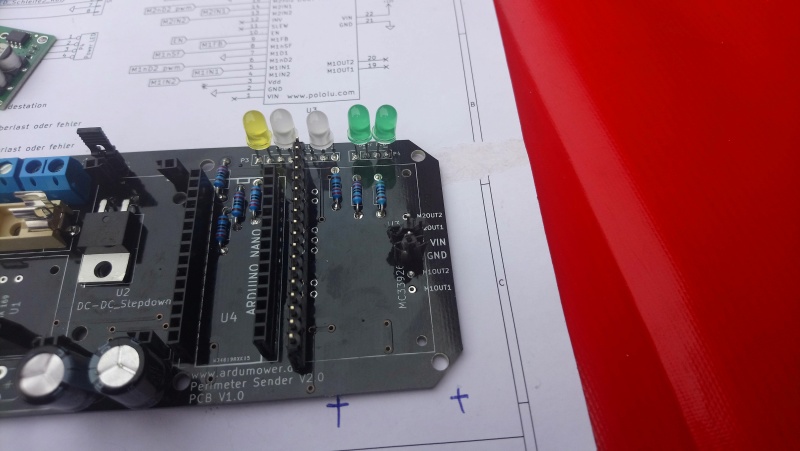
Diodes with correct plug in direction
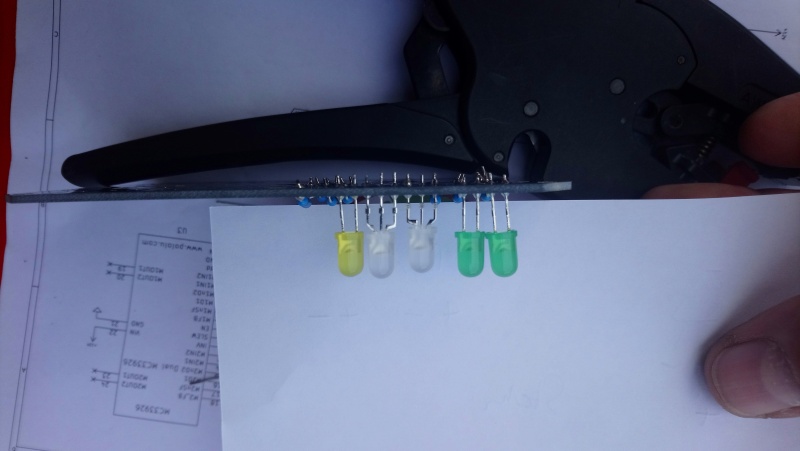
Diodes with correct plug in direction
Diodes with correct plug in direction

Cut the socket strip at a pin not in between
Solder the socket strips for the Nano

Solder the terminal blocks
Solder socket strips for INA and MC33926 motor drive
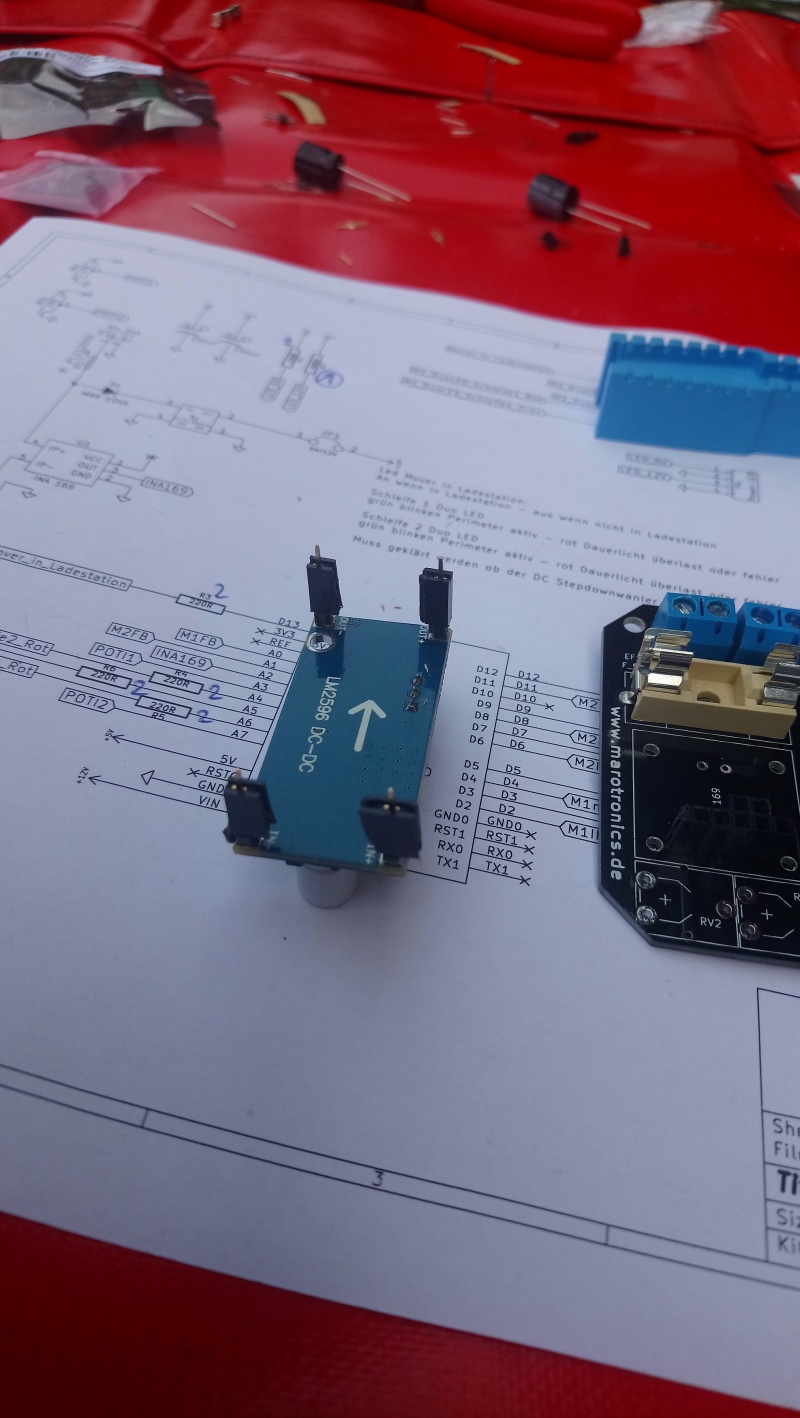
Solder pins to DC/DC converter and then put a socket on

Put the DC/DC converter on the board
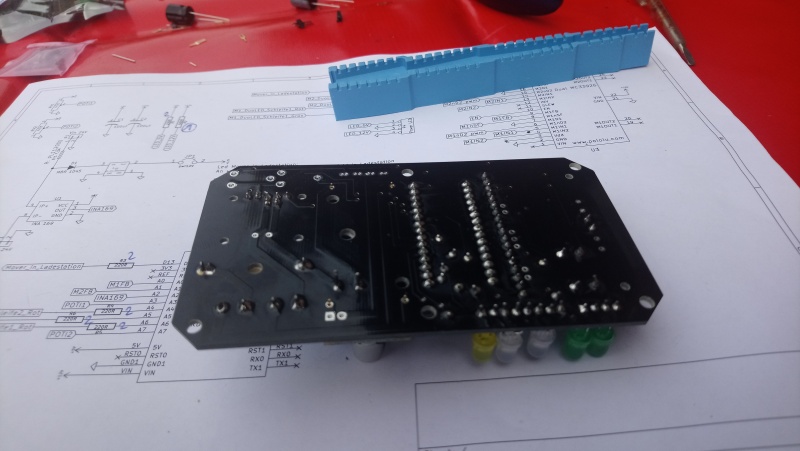
Flip the board and solder the sockets
Sockets for DC/DC converter soldered
Put in the pins for the INA
Install the INA and solder it
Put in the pins for the MC33926 motor driver
Install the motor driver and solder it. For a) Solder also the two right pins (original Ardumower config) For b)remove the the two right pins later
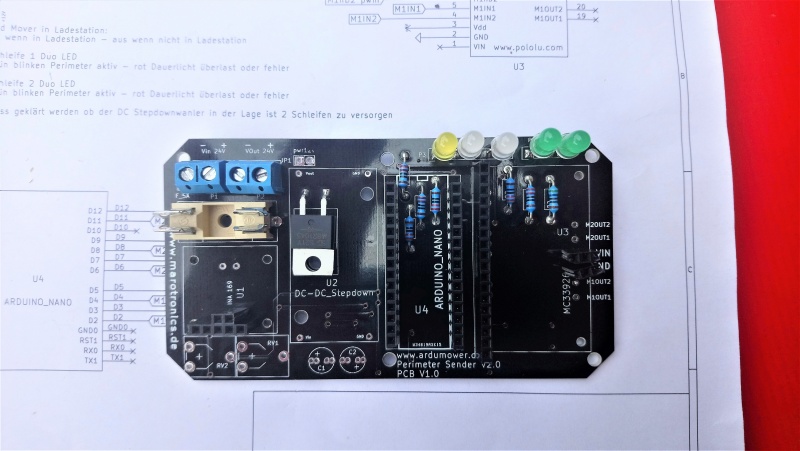
Solder the terminal blocks. For a) You have two pins soldered between the terminal blocks For b) you have to solder in 3 terminal blocks
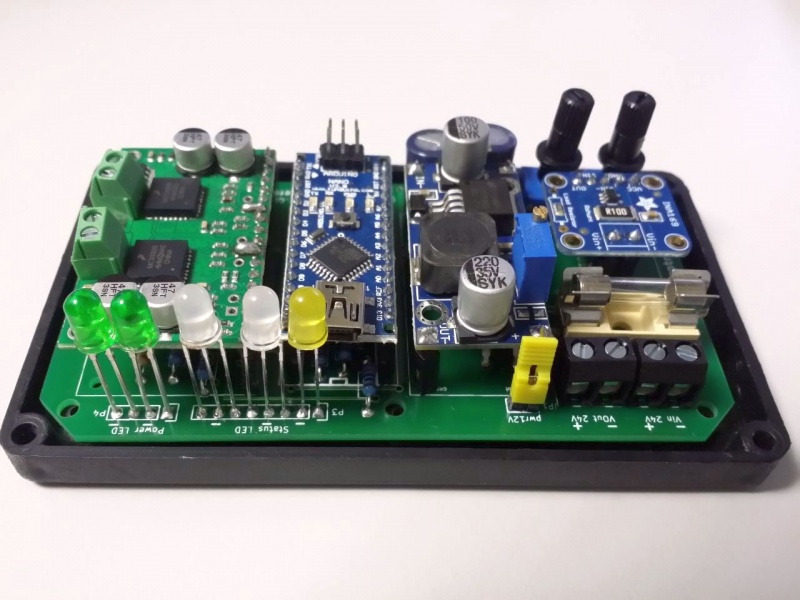
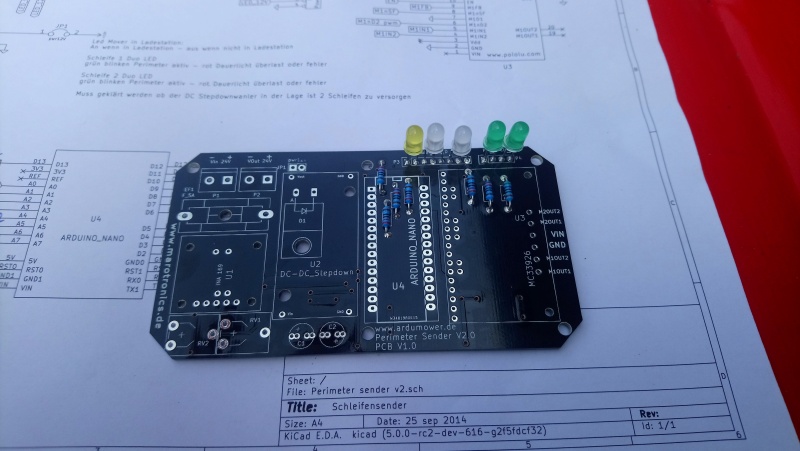
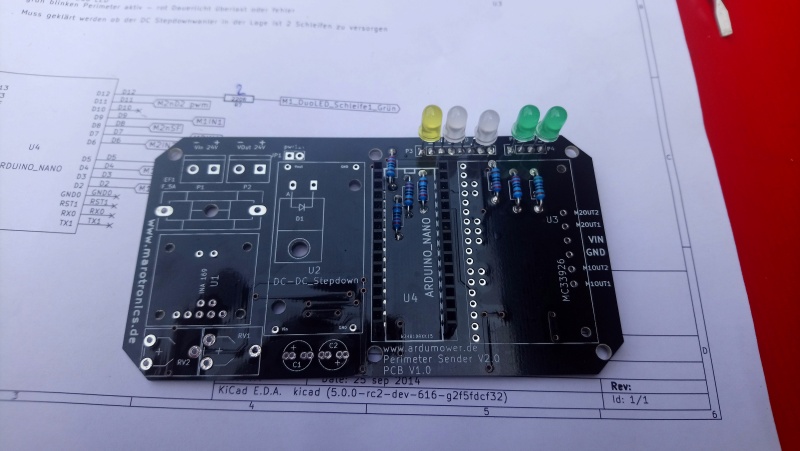
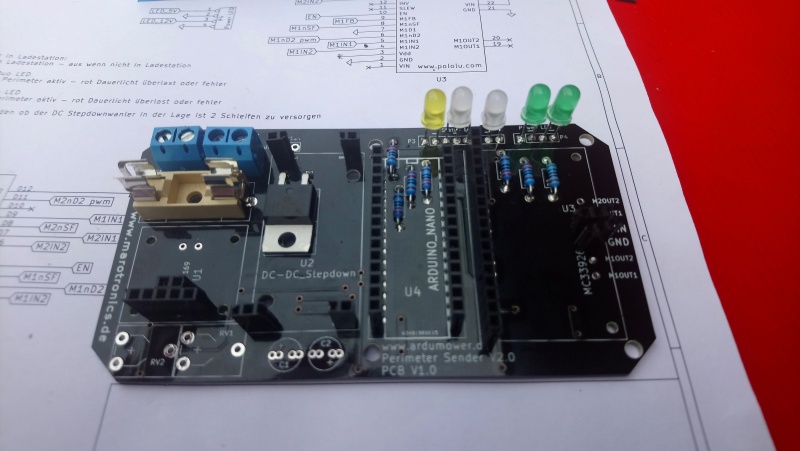
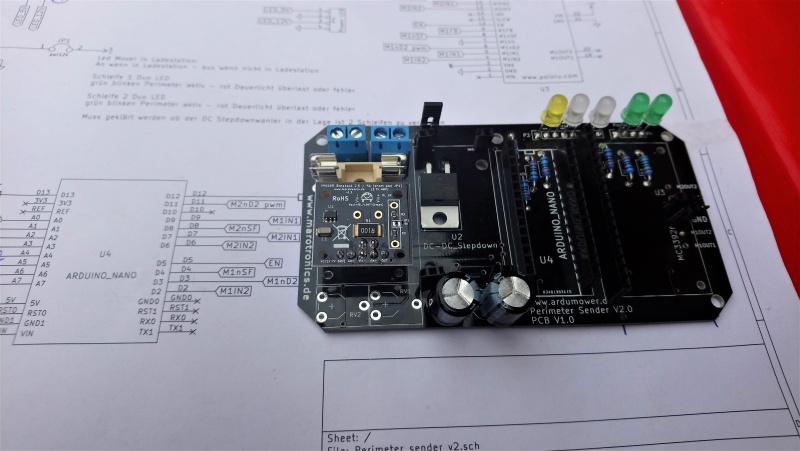
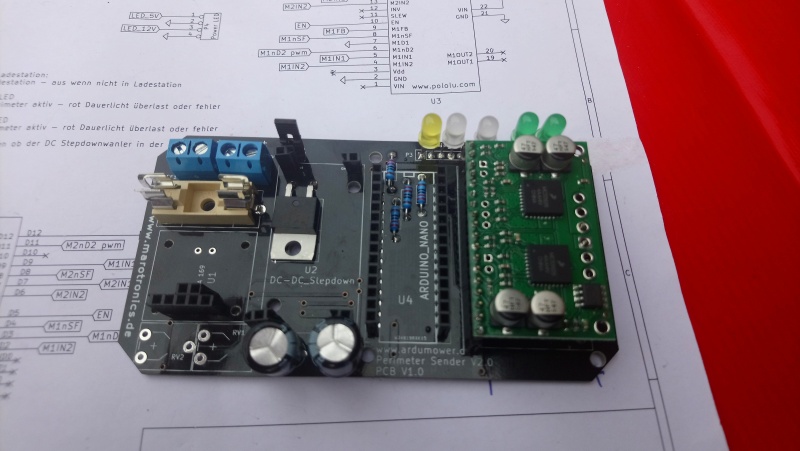
a) Board with all components - default Ardumower configuration

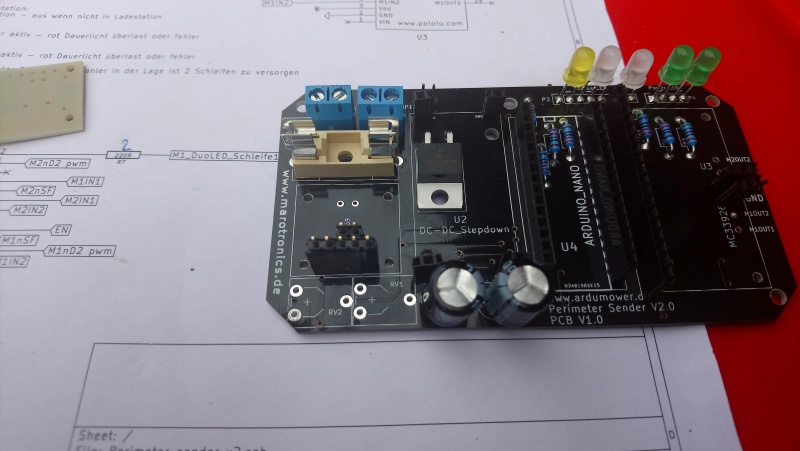
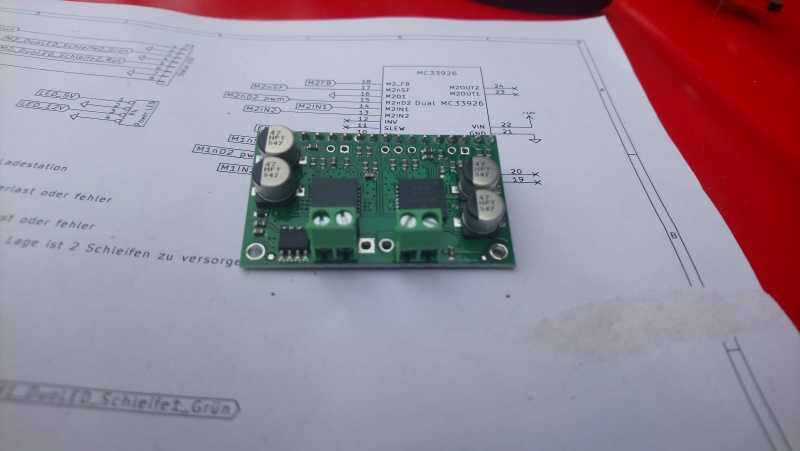
b) Board using external power supply for Vin and GND for the perimetersignal. Three terminal blocks installed on the motor driver because Vin and GND of the motordiver are not connected to the sender board


























