Ardumower future PCB: Unterschied zwischen den Versionen
Aus www.wiki.ardumower.de
(→Commuincation protocol) |
(→Architecture) |
||
| (8 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 6: | Zeile 6: | ||
* new CPU board for high-level control (brain), examples: Rasperry Zero | * new CPU board for high-level control (brain), examples: Rasperry Zero | ||
* commuincation interface and protocol (based on RS232 interface and session protocol) | * commuincation interface and protocol (based on RS232 interface and session protocol) | ||
| − | * | + | * simple-to-use (plug&play) IDE (including compiler & drivers) for the new CPU board |
* Java interface? | * Java interface? | ||
| Zeile 12: | Zeile 12: | ||
<gallery> | <gallery> | ||
File: raspberry.jpg | CPU board examples | File: raspberry.jpg | CPU board examples | ||
| + | File: Cpu_mcu.png | Bus architecture | ||
| + | File: Imu_motor_control.png | Motor control loop | ||
| + | File: Power_system.png | Power system | ||
</gallery> | </gallery> | ||
| + | |||
| + | |||
| + | * Main: Connectors for PMU, BMU, MMU, AMU, UMU, SMU, GY-521 | ||
| + | * PMU (Perimeter Management Unit): Mega 328 | ||
| + | * BMU (Bumper Management Unit): Mega 328, pressure sensor | ||
| + | * MMU (Motor Management Unit): Motor drivers | ||
| + | * AMU (Akku Management Unit) | ||
| + | * UMU (Ultra-Schall Management Unit) | ||
| + | * SMU (Sound Management Unit) | ||
=Commuincation architecture= | =Commuincation architecture= | ||
| − | * shared bus (RX/TX) for all sensor/actuator devices | + | * shared serial bus (RS232 RX/TX) for all sensor/actuator devices |
* open collector (OC) outputs for signal triggers/interrupts | * open collector (OC) outputs for signal triggers/interrupts | ||
* TX/RX for communication protocol (session-based) | * TX/RX for communication protocol (session-based) | ||
Aktuelle Version vom 22. Mai 2016, 11:56 Uhr
Inhaltsverzeichnis
Abstract
Not really a future PCB, but some ideas about adding an additional CPU to the existing Ardumower HW/SW architecture...
Architecture
- existing MCU (Mega) board for the controlling (actuators), sensing (sensors) - basically, current Ardumower PCB
- new CPU board for high-level control (brain), examples: Rasperry Zero
- commuincation interface and protocol (based on RS232 interface and session protocol)
- simple-to-use (plug&play) IDE (including compiler & drivers) for the new CPU board
- Java interface?
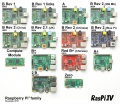
CPU board examples

Bus architecture

Motor control loop

Power system




- Main: Connectors for PMU, BMU, MMU, AMU, UMU, SMU, GY-521
- PMU (Perimeter Management Unit): Mega 328
- BMU (Bumper Management Unit): Mega 328, pressure sensor
- MMU (Motor Management Unit): Motor drivers
- AMU (Akku Management Unit)
- UMU (Ultra-Schall Management Unit)
- SMU (Sound Management Unit)
Commuincation architecture
- shared serial bus (RS232 RX/TX) for all sensor/actuator devices
- open collector (OC) outputs for signal triggers/interrupts
- TX/RX for communication protocol (session-based)
CPU hardware support/drivers
- For the driver side, ChibiOS could be a very nice start . It's an RTOS with high integration of hardware drivers , FATFS integration, LWIP etc...
http://www.chibios.org/dokuwiki/doku.php?id=chibios:matrix http://www.stevebate.net/chibios-rpi/GettingStarted.html
IDE/compiler for CPU
The IDE and integrated compiler should be plug&play (like Arduino IDE). Some ideas:
- emBlocks (integrated compiler for many CPUs including Rasperry PI, STM32, etc.)
- chibistudio (modified Eclipse)

Generating a new CPU binary image using 'emBlocks' IDE

Running new code on the CPU
Running new code on the new CPU should be simple for end-users. Some ideas:
- For debugging purpose, a serial connection (TX/RX) should be available for running new code, debugging
- For end-users, a small binary (SD card) should be available for download

Booting a new CPU binary image from SD card
