PCB 1.2 (Deutsch): Unterschied zwischen den Versionen
(→Ladegerät) |
(→Leiterplatten-Module) |
||
| (14 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[File: Pcb_top.jpg | 800px]] | [[File: Pcb_top.jpg | 800px]] | ||
| − | Diese Seite beschreibt,wie die Ardumower Hauptleiterplatte aufgebaut wird | + | Diese Seite beschreibt,wie die Ardumower Hauptleiterplatte aufgebaut wird und wie die einzelnen Module angeschlossen werden. |
===Benötigte Module für den Ardumower=== | ===Benötigte Module für den Ardumower=== | ||
| Zeile 169: | Zeile 169: | ||
===Leiterplatten-Module=== | ===Leiterplatten-Module=== | ||
| − | |||
| − | |||
{| class="wikitable" | {| class="wikitable" | ||
| Zeile 668: | Zeile 666: | ||
* [http://www.ardumower.de/media/kunena/attachments/1725/Motor-EntstoerungREV20150531.pdf (English comments)] | * [http://www.ardumower.de/media/kunena/attachments/1725/Motor-EntstoerungREV20150531.pdf (English comments)] | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
=Ladegerät= | =Ladegerät= | ||
| Zeile 743: | Zeile 715: | ||
[https://github.com/Ardumower/ardumower/tree/master/pcb/Produzierte_Platinen/Unterspannungsabschaltung_V1.0_geschlossen schematics] | [https://github.com/Ardumower/ardumower/tree/master/pcb/Produzierte_Platinen/Unterspannungsabschaltung_V1.0_geschlossen schematics] | ||
| − | === | + | ===Videos=== |
| + | #[http://www.youtube.com/watch?v=02REEUf99hI Driving into charging station] | ||
| + | #[http://www.youtube.com/watch?v=kfY6bBFdxYk Drive in and out] | ||
| + | #[https://www.youtube.com/watch?v=NLv-mXDqVQU&feature=youtu.be Tracking and docking] | ||
| + | #[https://www.youtube.com/watch?v=QCA6Dm3rs3M Finale Version] | ||
| − | |||
| − | + | =Bluetooth-Modul= | |
| + | Am Roboter wird das Bluetooth-Modul HC-05 verwendet, welches das das Serial Port Profil (SPP) unterstützt. SPP verwendet das Bluetooth Service Discovery Protocol (SDP) und das RFCOMM protocol. | ||
| + | |||
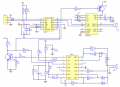
| + | ===Bluetooth HC-05=== | ||
<gallery> | <gallery> | ||
| − | File: | + | File: Pcb_bluetooth.jpg | PCB and HC-05 module |
| − | File: | + | File: Bluetooth_module.jpg | HC-05 Modul |
| − | File: | + | File: HC-05 schematics.jpg | HC-05 Schaltung |
| − | File: | + | File: HC-05.gif | HC-05 mit Taster |
</gallery> | </gallery> | ||
| − | + | Zur Programmierung wird der Key-Pin des BT-Modules mit 3,3V vom Arduino verbunden und danach die Verbindung wieder getrennt. | |
| − | + | ||
| − | + | Wiring: | |
| − | [[File: | + | Bluetooth HC05 VCC --- PCB VCC |
| + | Bluetooth HC05 GND --- PCB GND | ||
| + | Bluetooth HC05 TX --- PCB RX | ||
| + | Bluetooth HC05 RX --- PCB TX | ||
| + | |||
| + | Besonderheiten: Je nach Lieferant wird das HC-05 Modul mit 5 Volt VCC betrieben; Aufschrift "Power 3.6-6V"(JP 8 anstelle von JP 9 setzen). Sofern sich am Pin "EN" ein Microtaster befindet (siehe Foto), so muss dieser während der Konfiguration gedrückt sein, da ansonsten das Modul nicht erkannt wird. Key-Pin muss wie beschrieben auf +3,3 Volt gesetzt sein (JP 2). Rx/Tx laufen auch hier mit 3,3 Volt. | ||
| + | |||
| + | # pfodApp: Jetzt kann die APP pfodApp/ArduRemote gestartet werden und sich mit dem Ardumower verbinden. | ||
| + | # Nach erfolgreichem Verbinden leuchtet die Diode D8. | ||
| + | |||
| + | = Ultraschall Sensor = | ||
| + | |||
| + | [[File: ultrasonic.jpg | 400px]] | ||
| + | |||
| + | Mit einem Ultraschall Sensor (HC-SR04) ist der Ardumower in der Lage Hindernisse zu erkennen. | ||
| + | |||
| + | Distanz 2 bis 450 cm | ||
<gallery> | <gallery> | ||
| − | + | File: Bumperduino_pressure_sensor.jpg | 3x HC-SR04 | |
| − | File: | + | File: ultrasonic.jpg | HC-SR04 |
| + | File: Hc_sr04_schematics.png | HC-SR04 Schaltbild | ||
| + | </gallery> | ||
| + | |||
| + | === Verkabelung === | ||
| + | |||
| + | Ultraschall Sensor VCC (+5V) — PCB VCC (+5V) | ||
| + | Ultraschall Sensor GND — PCB GND | ||
| + | Ultraschall Sensor Trigger — PCB Digital Pin | ||
| + | Ultraschall Sensor Echo — PCB Digital Pin | ||
| + | |||
| + | |||
| + | Ein Schaltplan des Ultraschall Sensors kann hier eingesehen werden. [http://uglyduck.ath.cx/ep/archive/2014/01/Making_a_better_HC_SR04_Echo_Locator.html] | ||
| + | |||
| + | =Regensensor= | ||
| + | |||
| + | Durch die Verwendung eines Regensensors kann der Ardumower seine Arbeit beenden wenn es zu regnen beginnt. Zusätzlich kann er in die Ladestation fahren. | ||
| + | |||
| + | '''Bemerkung:''' Für das Modul YL-83 liegen keine langfristigen Erfahrungen bezüglich Korrosion vor! | ||
| + | |||
| + | <gallery> | ||
| + | File: Rain_sensor.jpg | Regensensor-Modul YL-83 | ||
| + | File: Rain_sensor.png | YL-83 Schaltplan | ||
| + | File: PrinzipschaltungRegensensor.jpg | Prinzip Regensensor | ||
| + | </gallery> | ||
| + | |||
| + | ===Verdrahtung=== | ||
| + | |||
| + | <blockquote style="background-color: lightgrey; border: solid thin grey;"> | ||
| + | <pre> | ||
| + | GND o-----o GND Regensensor-Modul | ||
| + | +5V o-----o VCC Regensensor-Modul | ||
| + | Ardumower pinRain o-----o D0 Regensensor-Modul | ||
| + | Regensensor-Modul IN o----- Regensensor | ||
| + | Regensensor-Modul IN o----- Regensensor | ||
| + | </pre> | ||
| + | </blockquote> | ||
| + | |||
| + | ===Fotos=== | ||
| + | |||
| + | <gallery> | ||
| + | File: Ardumower_survival2.jpg | ||
| + | File: Ardumower_rain_sensor_example.jpg | ||
</gallery> | </gallery> | ||
===Videos=== | ===Videos=== | ||
| − | #[ | + | #[https://www.youtube.com/watch?v=lLia2AjYHgc Test Regensensor] |
| − | #[ | + | #[https://www.youtube.com/watch?v=5Jwp4nEOTvM Regen-Simulation] |
| − | #[ | + | |
| − | #[ | + | ===Weitere Links=== |
| + | #[http://www.ardumower.de/media/kunena/attachments/1410/PrinzipschaltungRegensensor.jpg Principle schematics] | ||
| + | #[http://www.ardumower.de/index.php/de/forum/eure-ardumower-umsetzung/334-hasis-s-rasbot#4294 Rain sensor example] | ||
| + | |||
| + | |||
| + | =GPS= | ||
| + | <gallery> | ||
| + | File: ublox_neo_6m.jpg | ||
| + | |||
| + | File: GY-NEO6MV2_schematics.jpg | ||
| + | </gallery> | ||
| + | |||
| + | With the help of a GPS receiver (e.g. GY-NEO6MV2, ublox 6m), the long-term position can be calculated. Therefore, the GPS position values will be averaged. | ||
| + | |||
| + | Currently, GPS is used | ||
| + | * to receive current date and time | ||
| + | |||
| + | === Wiring: === | ||
| + | GPS VCC -- PCB VCC | ||
| + | GPS GND -- PCB GND | ||
| + | GPS TX -- PCB GPS RX | ||
| + | GPS RX -- PCB GPS TX | ||
| + | |||
| + | |||
| + | =Modellbau R/C= | ||
| + | |||
| + | Der Ardumower kann optional mit einer R/C Fernbedienung gesteuert werden. Hierfür sind die folgenden Komponenten notwendig: | ||
| + | *eine Modellbau Fernsteuerung (z.B. 2.4 Ghz) | ||
| + | *einen zur Fernsteuerung passenden Empfänger (4 Kanäle oder mehr) | ||
| + | |||
| + | <gallery> | ||
| + | File: Ardumower_rc.jpg | ||
| + | File: Ardumower_remote.jpg | ||
| + | </gallery> | ||
| + | |||
| + | ===Verkabelung=== | ||
| + | Die Kanalbelegung ist: | ||
| + | |||
| + | <blockquote style="background-color: lightgrey; border: solid thin grey;"> | ||
| + | <pre> | ||
| + | linker Steuerstock (links/rechts): pinRemoteSwitch | ||
| + | linker Steuerstock (hoch/runter): pinRemoteMow | ||
| + | rechter Steuerstock (links/rechts): pinRemoteSteer | ||
| + | rechter Steuerstock (hoch/runter): pinRemoteSpeed | ||
| + | </pre> | ||
| + | </blockquote> | ||
| + | |||
| + | ===Videos=== | ||
| + | #[http://www.youtube.com/watch?v=C4OLHhklZto&feature=player_embedded Demo] | ||
| + | |||
| + | |||
| + | =WLAN= | ||
| + | <gallery> | ||
| + | File: Esp8266.jpg | ||
| + | </gallery> | ||
| + | |||
| + | Dies ist ein Thema für Fortgeschrittene - bitte nur ein WLAN-Modul einsetzen wenn Eurer Ardumower voll vollständig läuft. A WIFI module can be used as an alternative for Bluetooth communication. Again, pfodApp is required to connect WIFI and the phone. | ||
| + | |||
| + | |||
| + | https://github.com/FredericG-BE/ardumower/wiki/Using-ESP8266-WIFI-module-on-Ardumower | ||
| + | |||
| + | = Echtzeit-Uhr (RTC) = | ||
| + | Damit der Roboter automatisch zu unterschiedlichen Zeitintervallen mit dem Mähen beginnen kann, benötigt er eine interne Uhr.(Timer). | ||
| + | |||
| + | eine Echtzeituhr (RTC) liefert ständig die aktuelle Zeit (Minute, Stunde) und das aktuelle Datum (Wochentag, Tag, Monat, Jahr).Mit Hilfe der eingebauten Batterie läuft die Uhrzeit weiter auch wenn der Roboter ausgeschaltet ist. | ||
| + | |||
| + | Zusätzlich enthält das RTC-Modul noch einen EEPROM-Speicher (nicht flüchtigen Speicher), der 4k Benutzerdaten dauerhaft speichern kann. | ||
| + | |||
| + | Example: DS1307 | ||
| + | |||
| + | <gallery> | ||
| + | File: ds1307.jpg | DS1307 | ||
| + | |||
| + | File: ds1307_schematics.jpg | DS1307_Schaltbild | ||
| + | </gallery> | ||
| + | |||
| + | === '''Anschluss''' === | ||
| + | |||
| + | Das RTC-Modul ist über den I2C-Bus mit dem Arduino Mega (parallel mit einigen anderen Modulen) verbunden. | ||
| + | |||
| + | <blockquote style="background-color: lightgrey; border: solid thin grey;"> | ||
| + | <pre> | ||
| + | DS1307 Module SDA — Arduino SDA Pin | ||
| + | DS1307 Module SCL — Arduino SCL Pin | ||
| + | DS1307 Module VCC (+5V) — Arduino VCC (+5V) | ||
| + | DS1307 Module GND — Arduino GND | ||
| + | </pre> | ||
| + | </blockquote> | ||
| + | |||
| + | === '''Beachte''' === | ||
| + | |||
| + | Wenn Kommunikationsprobleme beim Betrieb mehrerer Module am I2C-Bus auftreten, ist es empfehlenswert, die Kabellänge zu verringern. | ||
| + | |||
| + | |||
| + | = Arduino Dropsensor - Absturzsensor = | ||
| + | |||
| + | '''Funktion:''' | ||
| + | |||
| + | Der Arduino Dropsensor oder auch Absturzsensor ist dafür gedacht den Mover vor abstürzen vor Treppenabsätzen oder ähnlichen zu schützen. Ebenso kann dieser eingesetzt werden um Inseln von Bäumen und Blumenbeeten zu erkennen. | ||
| + | Voraussetzung dafür ist allerdings das dieser an der Graskante hin zur Insel mit einem kleinen Graben umgeben wird damit dieser zuverlässig erkannt werden | ||
| + | |||
| + | '''Anschluß:''' | ||
| + | |||
| + | Benötigt werden 2 IR Entfernungssensoren. Am besten sind solche geeignet die bereits in einem externen Gehäuse eingebaut sind. Diese haben auch auf der Rückseite eine Einstellmöglichkeit für die Entfernung bzw Empfindlichkeit. Die Standard Ausführung benötigt 3 Anschlussleitungen . | ||
| + | +5V, GND, Signalleitung und haben eine Empfindlichkeit von ca 30mm – 800mm. | ||
| + | Bei den Sensor den ich verwende handelt es sich um einen der gegen GND geschaltet wird. Dort habe ich zusätzlich eine Diode in die Signalleitung mit eingebaut um eventuelle positive Spannungen zum Bord zu blockieren und um einen eindeutigen Schaltzustand zu gewährleisten. | ||
| + | |||
| + | <gallery> | ||
| + | File: Ir Sensor.jpg | ||
| + | File: IR Sensor Diode.JPG | ||
| + | </gallery> | ||
| + | |||
| + | |||
| + | |||
| + | '''ohne eingbaute Diode''' | ||
| + | |||
| + | IR leuchtet bei Kontakt zur Oberfläche | ||
| + | |||
| + | Messung: | ||
| + | |||
| + | + nach Signalausgang = 4,96V | ||
| + | |||
| + | - nach Signalausgang = 0V | ||
| + | |||
| + | |||
| + | IR leuchtet nicht über den Abgrund | ||
| + | |||
| + | Messung: | ||
| + | |||
| + | + nach Signalausgang = 0V | ||
| + | |||
| + | - nach Signalausgang = 3,72V ( das hat mich gestört ) deshalb habe ich die Diode eingebaut | ||
| + | |||
| + | |||
| + | '''jetzt das ganze mit Diode in der Signalleitung''' | ||
| + | |||
| + | IR leuchtet bei Kontakt zur Oberfläche | ||
| + | |||
| + | Messung: | ||
| + | |||
| + | + nach Signalausgang = 4,7V | ||
| + | |||
| + | - nach Signalausgang = 0V | ||
| + | |||
| + | IR leuchtet nicht über den Abgrund | ||
| + | |||
| + | Messung: | ||
| + | |||
| + | + nach Signalausgang = 0V | ||
| + | |||
| + | - nach Signalausgang = 0V | ||
| + | |||
| + | jetzt 0V gemessen zwischen - und Signalausgang | ||
| + | |||
| + | Ich hatte bedenken gehabt das die 3,72V ein undefinierten Eingang schaffen was evl Probleme bei der Auswertung geben könnte. | ||
| + | |||
| + | |||
| + | '''Bekannte Probleme:''' | ||
| + | |||
| + | Ich habe die Beobachtung gemacht das wenn man die Entfernungseinstellung auf den Gras gegebenenfalls noch nach justiert werden muss. | ||
| + | Ebenfalls ist mir aufgefallen das wenn die Sensoren auf eine nasse Betonoberfläche stoßen, irrtümlich annehmen das ein Abgrund erkannt wird. | ||
| + | Da ich an meinen Testmower die Sensoren nur provisorisch angebracht habe, kann ich mir vorstellen das Fremdlicht zu Problemen in der Erkennung führt. | ||
| + | Ich vermute daher, das wenn man die Sensoren vor Fremdlicht schützt, sich die Zuverlässigkeit auch weiter erhöht. | ||
| + | |||
| + | Evl ist es nötig mit Hilfe einer LED die Fläche zu beleuchten um immer eine gleichmäßige Helligkeit zu gewährleisten. | ||
| + | |||
| + | |||
| + | =Relais= | ||
| + | <gallery> | ||
| + | File: 2-Channel-5V-Relai-fuer-Arduino.jpg.png | ||
| + | </gallery> | ||
| + | |||
| + | Mit einem Relais können am Ardumower montierte externe Funktionen (Hupe, Beleuchtung, etc.) mit der pfodApp ein- und ausgeschaltet werden. | ||
| + | |||
| + | ===Verkabelung=== | ||
| + | |||
| + | <blockquote style="background-color: lightgrey; border: solid thin grey;"> | ||
| + | <pre> | ||
| + | GND o-----o GND Relais Modul | ||
| + | +5V o-----o VCC Relais Modul | ||
| + | Ardumower pinUserSwitch1 o-----o IN1 Relais Modul | ||
| + | Relais Modul K1 o-----LED-----o LED supply voltage | ||
| + | Relais Modul K1 o-------------o GND | ||
| + | </pre> | ||
| + | </blockquote> | ||
| + | |||
| + | ===Bilder=== | ||
| + | <gallery> | ||
| + | File: Wiese_beleuchtet.jpg | beleuchteter Rasen | ||
| + | File: Ardumower_r201_mit_licht.jpg | Ardumower Beleuchtung | ||
| + | </gallery> | ||
Aktuelle Version vom 10. August 2020, 18:15 Uhr

Diese Seite beschreibt,wie die Ardumower Hauptleiterplatte aufgebaut wird und wie die einzelnen Module angeschlossen werden.
Inhaltsverzeichnis
Benötigte Module für den Ardumower

Alle Module und Teile können über den Shop ![]() bezogen werden.
bezogen werden.
Was wird für den Aufbau eines Ardumowers alles benötigt:
- Wichtige Module dazu wählen:
- Optionale Module:
PCB
Kernstück der Steuerung ist ein fertiges Microcontroller-Modul (Arduino Mega 2560 verwendet 54 I/O pins).

Komponenten Überblick

Die Ardumower LP verbindet alle Module (verfügbar im Shop)

PCB oben

PCB unten

PCB und MC33926



Hauptleiterplatte
Die Leiterplatte wurde mit folgenden Parametern entwickelt:
- LP Abmessungen 241x114mm
- Alle Module (Motortreiber, Bluetooth, usw.) können auf die Leiterplatte gelötet (oder gesteckt) werden (Modules sind im Ardumower-Shop verfügbar)
- Verwendet den Arduino Mega 2560
- Optional: kann der Arduino Due mittels zusätzlicher LP-Adapter verwendet werden
- Optional: integrierter Ladestromkreis (Strombegrenzung)
- alle Verbindungen, einschliesslich +5V und GND, sind über Steckverbinder realisiert
- Max. Strombelastung der Leiterbahnen (für Motoren): 8A
PCB Bauanleitung
Roboterplatine v0.5 (1. Prototyp, bitte nicht mehr verwenden)
Roboterplatine v1.2 (geringe Layoutänderungen)
- Schaltpläne
- Photos
- Bauanleitung
- WorkaRound20150527
- WorkaRound20150530
- siehe auch: Dokumentationen im Github
12V/24V: Die Platine ist für 24V ausgelegt worden. Für 12V müssen einige wenige Sachen geändert werden auf der 1.2 Platine:
- R2 Vorwiderstand „Led Betriebsspannung“ muss bei 12V auf 560OHm angepasst werden
- R11 Vorwiderstand“StationsLED „ muss bei 12V auf 560OHm angepasst werden
- und man benötigt noch statt den 24V Relais ein 12V Relais.
Bemerkung: Das Schaltbild und die Platinen-Zeichnungen wurden mit KiCad entwickelt. Sie können hier heruntergeladen github und damit bearbeitet werden KiCAD software.
PCB Bauanleitung Videos
- Widerstände
- Dioden und Relais
- Elkos und Transistoren
- Piezo Buzzer und Sicherung
- Stiftleisten
- DC/DC Wandler
- RTC-Modul
- Dual MC33926
- INA169
- Akku & Ladegerät
Leiterplatten Jumper

| Wenn benutzt... | ...JA | ...NEIN | Kommentar |
|---|---|---|---|
| integrierter Laderegler mit einstellbarem
Spannungsregler (LM350T) mit Potentiometer für einstellbare Ladespannung (empfohlen: Nein) |
D7: DIODE
D3: DIODE C1, C4, U4, RV1: verwendet |
D7: brücken
D3: brücken C1, C4, U4, RV1: nicht verwendet |
Bei externem Ladegerät nicht verwenden |
| externe Stromversorgung währen des Ladens (empfohlen: Nein) | JP6: geschlossen
JP7: offen D4: DIODE C5: nicht verwendet |
JP6: offen
JP7: geschlossen D4: brücken C5: verwendet |
um Platine von aussen mit Strom zu versorgen (trennt Akku von Platine) während des Ladens |
| von Arduino gesteuertes Laderelais (empfohlen: ja) | JP4: geschlossen
JP5: offen |
JP4: offen
JP5: geschlossen |
verwendet für vom Arduino gesteuertem Laderelais (keine automatische Ladung) |
| Arduino Due (3.3V I/O) | LP0, ..., LP15: offen | LP0, ..., LP15: geschlossen | Nicht verwenden bei Arduino Mega |
| Bluetooth VCC=3.3V | JP8: offen
JP9: geschlossen |
JP8: geschlossen
JP9: offen |
viele neuere Module laufen mit 3.3V |
| Bluetooth Programmier-Modus | JP2: geschlossen | JP2: offen | verwendet für Programmierung der BAUD-Rate usw. |
Leiterplatten-Module
| Module | Feature | Pinout | Optional | Comment |
|---|---|---|---|---|
| U1 | DC/DC Wandler (10V) | GND, Vout, Vin, GND | Nein | |
| U2 | Bluetooth (HC-05) | VCC, GND, TXD, RXD, Key, LED | Ja | |
| U3 | Stromsensor (Ladestrom) | VCC, GND, OUT, IP+, IP-5 | Ja | |
| U4 | Laderegler (LM350T) | AJD, OUT, IN | Ja | |
| U5 | Stromsensor (währen des Ladens) | VCC, GND, OUT, IP+, IP-5 | Ja | |
| U6 | DC/DC Wandler (3.3V) | GND, Vout, Vin, GND | Nein | |
| U7 | DC/DC Wandler (5V) | GND, Vout, Vin, GND | Nein | |
| U8 | Echtzeituhr (DS1307) | Batt, GND, VCC, SDA, SCL, DS, SQ | Ja | |
| U9 | WLAN (ESP8266) | TX, CH_PD, Reset, VCC, GND, GP_IO2, GP_IO0, RX | Ja | |
| U10 | Pegelwandler 5V->3V (Arduino Due) | Ja | ||
| U11 | WLAN(ESP8266) | TX, CH_PD, Reset, VCC, GND, GP_IO2, GP_IO0, RX | Ja | alternative Montageposition |
Leiterplatten Steckverbinder
| Connector | Feature | Pinout | Optional | Comment |
|---|---|---|---|---|
| P1 | Sonar mitte (HC SR-04) | 5V, GND, Trigger, Echo | ja | |
| P2 | Sonar rechts (HC SR-04) | 5V, GND, Trigger, Echo | ja | |
| P3 | Sonar links (HC SR-04) | 5V, GND, Trigger, Echo | ja | |
| P4 | reserviert | ja | ||
| P5 | IMU (gyro,acceleration,compass) (GY-80) | ja | ||
| P6 | Rasensensor | ja | ||
| P7 | Status LEDs | ja | ||
| P8 | Odometrie rechts | ja | ||
| P9 | Odometrie links | ja | ||
| P10 | GPS (GY-NEO6MV2) | ja | ||
| P11 | Bumper | GND, GND, rechts, links | ja | |
| P12 | Perimeter-Empfänger (mitte oder links) | 5V, GND, perimeter | ja | |
| P13 | R/C Fernsteuerung | 5V, GND, mow, steer, speed, switch | ja | |
| P14 | Messpunkte | 5V, GND, (abhängig von JP15: 3.3V, 5V or Arduino 3.3V) | ja | |
| P15 | Antriebsmotor links | M1OUT1, M1OUT2 | Nein | |
| P16 | Optionaler Motortreiber-Eingang | ja | nicht verbinden | |
| P17 | Optionaler Motortreiber-Eingang | ja | nicht verbinden | |
| P18 | Antriebsmotor rechts | M2OUT1, M2OUT2 | Nein | |
| P19 | Neigungssensor | 5V, GND, tilt | ja | |
| P20 | Taster (Start/Stop) | Nein | ||
| P21 | Absturzsensor rechts | ja | ||
| P22 | reserviert | ja | ||
| P23 | reserviert | ja | ||
| P24 | reserviert | ja | ||
| P25 | reserviert | ja | ||
| P26 | reserviert | ja | ||
| P27 | reserviert | ja | ||
| P28 | reserviert | ja | ||
| P29 | reserviert | ja | ||
| P30 | Perimeter-Empfänger rechts | ja | ||
| P31 | Absturzsensor links | ja | ||
| P32 | GND | ja | ||
| P33 | 5V | ja | ||
| P34 | 3.3V | ja | ||
| P35 | Mähmotor Drehzahl | ja | ||
| P36 | reserviert | ja | ||
| P37 | Mähmotor | Nein | ||
| P38 | reserviert | ja | ||
| P39 | reserviert | ja | ||
| P40 | User switches | ja | ||
| P41 | Regensensor | ja | ||
| P42 | Ladeanschluss | ja | ||
| P43 | Akku (24V) | Nein | ||
| P44 | WLAN Modul (ESP8266) | ja | ||
| P45 | reserviert | ja | ||
| P46 | reserviert | ja |
Stromversorgung
Bitte lies auch den Abschnitt 'Spannungen' unter Motor-Treiber für mehr Informationen über die Motorspannung
Empfehlenswert ist die Verwendung von Step down Spannungswandlern (d.h. Module verwenden LM2596) um die 5V Spannung für den Arduino und alle zusätzlichen Module zu erzeugen. vor der Verbindung mit der Schaltung (Jumper), stelle den Wandler auf 5V ein, dann erst den Jumper schliessen.
![]() Warnung : niemals mehr als 5V an die Arduino 5V pins anlegen, das würde den Arduino zerstören. Deshalb, immer die 5V messen bevor die Verbindung zum 5V Pin des Arduino erfolgt!
Alle Komponenten zusammen (wie im Schaltbild gezeigt) benötigen ca. 5W Leistung.
Warnung : niemals mehr als 5V an die Arduino 5V pins anlegen, das würde den Arduino zerstören. Deshalb, immer die 5V messen bevor die Verbindung zum 5V Pin des Arduino erfolgt!
Alle Komponenten zusammen (wie im Schaltbild gezeigt) benötigen ca. 5W Leistung.
Motoren
Das Ardumower- Design verwendet zwei verschiedene Typen von Motoren. Alle Motoren können im Shop ![]() ) erworben werden:
) erworben werden:
- Zwei Getriebemotoren als Antriebe (Radmotoren) mit eingebautem Encoder (für Weg- und Geschwindigkeitssteuerung)
- einen Motor (mit hoher Drehzahl) zum Mähen (Mähmotor)
Zur Steuerung der Motoren sind Motortreiber erforderlich. Desweiteren messen wir den Motorstrom mit dem Motortreiber. Dies erlaubt uns, Hindernisse zu detektieren, da der Motorstrom bei Hindernissen ansteigt. Ardumower verwendet zwei Dual MC33926 Motortreiber. Zwei Kanäle für linker und rechter Motor und zwei Kanäle (parallel geschaltet) für den Mähmotor.
Es ist nicht empfehlenswert die Motoren direkt an die Motortreiber anzuschliessen, da gerade beim schnellen Wechsel von Vor- und Rückwärtsfahren (bzw. umgekehrt) hohe Spannungsspitzen auftreten und diese können die Motortreiber auf lange Sicht bestädigen. Daher verwenden wir ein Protector Board zwischen Motortreiber und Motoren.

Spannungen
Der Ardumower verwendet wie alle modernen Systeme 24V Motoren.
Bauanleitung Motortreiber (MC33926)
Eigenschaften des Motortreibers: bis zu 3A, mit integriertem Stromsensor und Thermoschutz

PCB, MC33926, protector and motors
PCB und MC33926

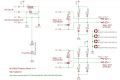
Pin-Belegung

Schaltbild MC33926


Hier findest Du eine Anleitung wie der Motortreiber auf das PCB gesetzt wird.
Für Verkabelung von Motortreiber, Protector PCB und Motoren bitte die Anleitung im Abschnitt "Protector PCB" öffnen.
Protector PCB
![]() Protektorboard: Bei 24V Systemen kommt es zu Spannungsspitzen, die den Motortreiber schnell zerstören können. Daher wurde das Protektorboard entwickelt um dies zu verhindern. Es werden 2 Stück benötigt. Einen für die Antriebsräder und einen für den Mähmotor. Schaden kann das Protektorboard auf keinen Fall.
Protektorboard: Bei 24V Systemen kommt es zu Spannungsspitzen, die den Motortreiber schnell zerstören können. Daher wurde das Protektorboard entwickelt um dies zu verhindern. Es werden 2 Stück benötigt. Einen für die Antriebsräder und einen für den Mähmotor. Schaden kann das Protektorboard auf keinen Fall.
PCB, MC33926, protector and motors

Protector PCB

Protector PCB Verdrahtung
Protector PCB Schaltbild



Anschluss Radmotoren
PCB, MC33926, protector and motors

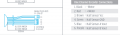
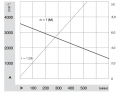
Ardumower Getriebemotor(Welle: 8mm Durchmesser, 5900 U/min, 0.055 Nm, Übersetzung: 1:212, Ausgangs-Drehmoment 2.45Nm, Ausgangsdrehzahl 31 U/min)
Motor wiring
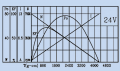
Ardumower Getriebemotor Kennlinie (nur Motor)

Getriebe-Spezifikation



Die beiden Getriebemotoren werden unabhängig voneinander gesteuert ('Differentialantrieb') :
- Fahren vorwärts/rückwärts
- Lenken links/rechts
Die Eigenschaften der Ardumower - Radmotoren:
- Eine Drehzahl bis zu 31 U/min erlaubt es, den Roboter mit einer ausreichenden Geschwindigkeit von bis zu (Meter/sec = 31rpm/60 * PI * 0.25m = 0.4m/sec) bei Verwendung von Rädern mit 250 mm Durchmesser, zu bewegen.
- ein hohes Drehmoment (2.45 Nm) garantiert, dass der Roboter kleinere Hügel erklimmen kann (mit 2 Motoren, 250 mm Rädern, 31 U/min = 0.4m/s, Beschleunigung = 0.2 ( 1/2 der Nominalgeschwindigkeit) see calculator
- Der eingebaute Encoder kann die Drehzahl messen, die Geschwindigkeit und den Weg feststellen.
- 24V (Laststrom ca. 1A)
Der linke Getriebe-Motor wird wie folgt an das Protector Board angeschlossen:
Motor Anschluss (linker Motor):
Motor (black) ==== Protector board Motor_1_OUT(1) Motor (red) ==== Protector board Motor_1_OUT(2)
Für den rechten Motor entsprechend an Protector board Motor_2_OUT(1,2) anschliessen.
Anschluss Odometrie der Getriebemotoren
Der im Ardumower-Getriebe-Motor eingebaute Encoder hilft dem Ardumower die Drehzahl bzw. zurückgelegte Distanz zu ermitteln. Hier siehst Du wie die Odometrie der Motoren an das PCB angeschlossen wird.
Motor wiring
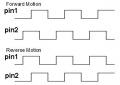
Encoder signal

Motor Odometrie Anschluss (linker Motor):
Motor (brown) ---- PCB VCC Motor (green) ---- PCB GND Motor (blue) ---- PCB OdometryLeft (3) Motor (purple) ---- PCB OdometryLeft (4)
Für den rechten Motor entsprechend an "PCB OdometryRight" anschliessen.
WICHTIG: Bei PCB v0.5/1.2 fehlen die Pull-up Widerstände! Du musst sie nachträglich am PCB wie folgt ergänzen:
PCB OdometryLeft(3) --- 4.7k --- 5v PCB OdometryLeft(4) --- 4.7k --- 5v
Anschluss Mähmotor
PCB, MC33926, protector and motors

Ardumower Mähmotor
Ardumower Mähmotor -Kennlinie
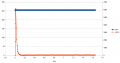
Anlaufstrom
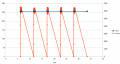
Mähmotor blockiert, 500ms detection (max), waittime: 5sec (min)




Eigenschaften des Ardumower-Mähmotors:
- schnell genug um den Rasen zu schneiden (3150 U/min)
- genügend Drehmoment (140 mNm / 46 W)
- leises Mähen (man hört ihn kaum)
- 24V, Laststrom ~1.0A (L=2.8mH, R=1.9ohm)
Es wird ein MC33926 Motortreiber in Parallelschaltung zur Ansteuerung des Mähmotors verwendet.
![]() Sicherheitshinweis: Entferne zur Sicherheit stets die Messer bei deinen ersten Tests!
Sicherheitshinweis: Entferne zur Sicherheit stets die Messer bei deinen ersten Tests!
Der Mähmotor wird wie folgt an das Protector board angeschlossen:
Motor (black) ==== Protector board Motor_1_OUT(1) Motor (red) ==== Protector board Motor_1_OUT(2)
Reduzierung von Motorstörungen
Folgende Anleitung zeigt wie Du Motorstörungen reduzieren kannst.

Reduzierung von Motorstörungen

Ladegerät
Hier siehst Du wie der Ardumower-Akku geladen wird. Falls Du keine Ladestation verwenden möchtest (oder für Deine ersten Versuche) kannst Du das Ladegerät direkt an den Ardumower anschliessen.

Wir benutzen ein Lithium Ion e-bike Ladegerät (29.4V, 1.5A Ladestrom-Begrenzung) das über den Marotronics-Shop shop ![]() bezogen werden kann . Das Ladegerät wird in einem geschützten Bereich untergebracht (z.B. im Haus) und mit der Ladestation verbunden. Das Ladegerät sollte folgendes leisten( hier für Lithium-Ionen-Zellen, bei Bleiakkus ist es ähnlich aber weniger kritisch):
bezogen werden kann . Das Ladegerät wird in einem geschützten Bereich untergebracht (z.B. im Haus) und mit der Ladestation verbunden. Das Ladegerät sollte folgendes leisten( hier für Lithium-Ionen-Zellen, bei Bleiakkus ist es ähnlich aber weniger kritisch):
- Laden des Akkupacks über dei Ladeanschlüsse des Roboters
- Einhaltung der maximalen Ladespannung (Ladeschluss-Spannung)
- Einhaltung dess maximalen Ladestroms (Ladestrom-Begrenzung)
Wenn du ein vorhandenes Ladegerät benutzt, sind diese Anforderungen mit höchstwahrscheinlich erfüllt.
Leistungsbilanz
- 2 x Getriebemotor jeder 1A (unter Last): 2A, 27V (gemessen mit max. 80% Genauigkeit des Motortreibers)
- 1 x Mähmotor 1A (unter normaler Last): 1A, 27V (gemessen mit max. 80% Genauigkeit des Motortreibers)
- Board: 1A, 5 Volt (nicht gemessen)
Insgesamt: 3A * 27V + 1A * 5V = 81W + 5W = 86W
Akku

Als Akku wird ein 'Sony Konion 7S2P' Lithium Ion Akkupack (Sony Konion US18650V3 2250 mAh cells, Li-Mn), 29.4V x 4500 mAh = 132 Wh, 500 Ladezyklen, 126 x 36 x 65 mm (LBH) verwendet.
Die Mähzeit beträg mit den Ardumower-Motoren ungefähr 1,5 Stunden (132 Wh / 86W).
Akku Lade-/Entladebedingungen für optimale Lebensdauer:
- Ladeschlussspannung pro Zelle: max 4.15V ( 0.3A - 0.1A Rest-Ladestrom)
- minimale Entladespannung: min 3.1V
Standby-Aus/ Unterspannungsschutz
Der Ardumower kann um einem Unterspannungsschutz erweitert werden. Es gibt zwei Gründe für einen Batterie-Schalter (standby-off mechanism):
1. Grund: Wenn der Roboter nicht innerhalb von 5 min startet,sollte der Akku abgeschaltet werden, um Strom zu sparen.
2. Grund: Moderne Akkus sollten nicht komplett entladen werden. Wenn der Roboter aus irgend einem Grund nicht aufgeladen werden kann und die Akkuspannung unter einen bestimmten Grenzwert fällt, sollte er in der Lage sein, sich selbst abzuschalten (Unterspannungsschutz)

Unterspannungsschutz- PCB

Unterspannungsschutz- PCB Verdrahtung


Videos
Bluetooth-Modul
Am Roboter wird das Bluetooth-Modul HC-05 verwendet, welches das das Serial Port Profil (SPP) unterstützt. SPP verwendet das Bluetooth Service Discovery Protocol (SDP) und das RFCOMM protocol.
Bluetooth HC-05
PCB and HC-05 module

HC-05 Modul
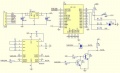
HC-05 Schaltung
HC-05 mit Taster



Zur Programmierung wird der Key-Pin des BT-Modules mit 3,3V vom Arduino verbunden und danach die Verbindung wieder getrennt.
Wiring:
Bluetooth HC05 VCC --- PCB VCC Bluetooth HC05 GND --- PCB GND Bluetooth HC05 TX --- PCB RX Bluetooth HC05 RX --- PCB TX
Besonderheiten: Je nach Lieferant wird das HC-05 Modul mit 5 Volt VCC betrieben; Aufschrift "Power 3.6-6V"(JP 8 anstelle von JP 9 setzen). Sofern sich am Pin "EN" ein Microtaster befindet (siehe Foto), so muss dieser während der Konfiguration gedrückt sein, da ansonsten das Modul nicht erkannt wird. Key-Pin muss wie beschrieben auf +3,3 Volt gesetzt sein (JP 2). Rx/Tx laufen auch hier mit 3,3 Volt.
- pfodApp: Jetzt kann die APP pfodApp/ArduRemote gestartet werden und sich mit dem Ardumower verbinden.
- Nach erfolgreichem Verbinden leuchtet die Diode D8.
Ultraschall Sensor

Mit einem Ultraschall Sensor (HC-SR04) ist der Ardumower in der Lage Hindernisse zu erkennen.
Distanz 2 bis 450 cm

3x HC-SR04

HC-SR04
HC-SR04 Schaltbild


Verkabelung
Ultraschall Sensor VCC (+5V) — PCB VCC (+5V) Ultraschall Sensor GND — PCB GND Ultraschall Sensor Trigger — PCB Digital Pin Ultraschall Sensor Echo — PCB Digital Pin
Ein Schaltplan des Ultraschall Sensors kann hier eingesehen werden. [1]
Regensensor
Durch die Verwendung eines Regensensors kann der Ardumower seine Arbeit beenden wenn es zu regnen beginnt. Zusätzlich kann er in die Ladestation fahren.
Bemerkung: Für das Modul YL-83 liegen keine langfristigen Erfahrungen bezüglich Korrosion vor!

Regensensor-Modul YL-83
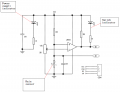
YL-83 Schaltplan
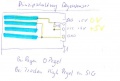
Prinzip Regensensor



Verdrahtung
GND o-----o GND Regensensor-Modul
+5V o-----o VCC Regensensor-Modul
Ardumower pinRain o-----o D0 Regensensor-Modul
Regensensor-Modul IN o----- Regensensor
Regensensor-Modul IN o----- Regensensor
Fotos


Videos
Weitere Links
GPS


With the help of a GPS receiver (e.g. GY-NEO6MV2, ublox 6m), the long-term position can be calculated. Therefore, the GPS position values will be averaged.
Currently, GPS is used
- to receive current date and time
Wiring:
GPS VCC -- PCB VCC GPS GND -- PCB GND GPS TX -- PCB GPS RX GPS RX -- PCB GPS TX
Modellbau R/C
Der Ardumower kann optional mit einer R/C Fernbedienung gesteuert werden. Hierfür sind die folgenden Komponenten notwendig:
- eine Modellbau Fernsteuerung (z.B. 2.4 Ghz)
- einen zur Fernsteuerung passenden Empfänger (4 Kanäle oder mehr)


Verkabelung
Die Kanalbelegung ist:
linker Steuerstock (links/rechts): pinRemoteSwitch linker Steuerstock (hoch/runter): pinRemoteMow rechter Steuerstock (links/rechts): pinRemoteSteer rechter Steuerstock (hoch/runter): pinRemoteSpeed
Videos
WLAN

Dies ist ein Thema für Fortgeschrittene - bitte nur ein WLAN-Modul einsetzen wenn Eurer Ardumower voll vollständig läuft. A WIFI module can be used as an alternative for Bluetooth communication. Again, pfodApp is required to connect WIFI and the phone.
https://github.com/FredericG-BE/ardumower/wiki/Using-ESP8266-WIFI-module-on-Ardumower
Echtzeit-Uhr (RTC)
Damit der Roboter automatisch zu unterschiedlichen Zeitintervallen mit dem Mähen beginnen kann, benötigt er eine interne Uhr.(Timer).
eine Echtzeituhr (RTC) liefert ständig die aktuelle Zeit (Minute, Stunde) und das aktuelle Datum (Wochentag, Tag, Monat, Jahr).Mit Hilfe der eingebauten Batterie läuft die Uhrzeit weiter auch wenn der Roboter ausgeschaltet ist.
Zusätzlich enthält das RTC-Modul noch einen EEPROM-Speicher (nicht flüchtigen Speicher), der 4k Benutzerdaten dauerhaft speichern kann.
Example: DS1307

DS1307
DS1307_Schaltbild


Anschluss
Das RTC-Modul ist über den I2C-Bus mit dem Arduino Mega (parallel mit einigen anderen Modulen) verbunden.
DS1307 Module SDA — Arduino SDA Pin DS1307 Module SCL — Arduino SCL Pin DS1307 Module VCC (+5V) — Arduino VCC (+5V) DS1307 Module GND — Arduino GND
Beachte
Wenn Kommunikationsprobleme beim Betrieb mehrerer Module am I2C-Bus auftreten, ist es empfehlenswert, die Kabellänge zu verringern.
Arduino Dropsensor - Absturzsensor
Funktion:
Der Arduino Dropsensor oder auch Absturzsensor ist dafür gedacht den Mover vor abstürzen vor Treppenabsätzen oder ähnlichen zu schützen. Ebenso kann dieser eingesetzt werden um Inseln von Bäumen und Blumenbeeten zu erkennen. Voraussetzung dafür ist allerdings das dieser an der Graskante hin zur Insel mit einem kleinen Graben umgeben wird damit dieser zuverlässig erkannt werden
Anschluß:
Benötigt werden 2 IR Entfernungssensoren. Am besten sind solche geeignet die bereits in einem externen Gehäuse eingebaut sind. Diese haben auch auf der Rückseite eine Einstellmöglichkeit für die Entfernung bzw Empfindlichkeit. Die Standard Ausführung benötigt 3 Anschlussleitungen . +5V, GND, Signalleitung und haben eine Empfindlichkeit von ca 30mm – 800mm. Bei den Sensor den ich verwende handelt es sich um einen der gegen GND geschaltet wird. Dort habe ich zusätzlich eine Diode in die Signalleitung mit eingebaut um eventuelle positive Spannungen zum Bord zu blockieren und um einen eindeutigen Schaltzustand zu gewährleisten.

ohne eingbaute Diode
IR leuchtet bei Kontakt zur Oberfläche
Messung:
+ nach Signalausgang = 4,96V
- nach Signalausgang = 0V
IR leuchtet nicht über den Abgrund
Messung:
+ nach Signalausgang = 0V
- nach Signalausgang = 3,72V ( das hat mich gestört ) deshalb habe ich die Diode eingebaut
jetzt das ganze mit Diode in der Signalleitung
IR leuchtet bei Kontakt zur Oberfläche
Messung:
+ nach Signalausgang = 4,7V
- nach Signalausgang = 0V
IR leuchtet nicht über den Abgrund
Messung:
+ nach Signalausgang = 0V
- nach Signalausgang = 0V
jetzt 0V gemessen zwischen - und Signalausgang
Ich hatte bedenken gehabt das die 3,72V ein undefinierten Eingang schaffen was evl Probleme bei der Auswertung geben könnte.
Bekannte Probleme:
Ich habe die Beobachtung gemacht das wenn man die Entfernungseinstellung auf den Gras gegebenenfalls noch nach justiert werden muss. Ebenfalls ist mir aufgefallen das wenn die Sensoren auf eine nasse Betonoberfläche stoßen, irrtümlich annehmen das ein Abgrund erkannt wird. Da ich an meinen Testmower die Sensoren nur provisorisch angebracht habe, kann ich mir vorstellen das Fremdlicht zu Problemen in der Erkennung führt. Ich vermute daher, das wenn man die Sensoren vor Fremdlicht schützt, sich die Zuverlässigkeit auch weiter erhöht.
Evl ist es nötig mit Hilfe einer LED die Fläche zu beleuchten um immer eine gleichmäßige Helligkeit zu gewährleisten.
Relais

Mit einem Relais können am Ardumower montierte externe Funktionen (Hupe, Beleuchtung, etc.) mit der pfodApp ein- und ausgeschaltet werden.
Verkabelung
GND o-----o GND Relais Modul
+5V o-----o VCC Relais Modul
Ardumower pinUserSwitch1 o-----o IN1 Relais Modul
Relais Modul K1 o-----LED-----o LED supply voltage
Relais Modul K1 o-------------o GND
Bilder

beleuchteter Rasen

Ardumower Beleuchtung


{kind=link}