Laden: Unterschied zwischen den Versionen
(→Battery) |
(→Standby-off / Under-voltage protection) |
||
| Zeile 38: | Zeile 38: | ||
* minimale Entladespannung: min 3.1V | * minimale Entladespannung: min 3.1V | ||
| − | =Standby- | + | =Standby-Aus/ Unterspannungsschutz= |
| − | + | Es gibt zwei Gründe für einen Batterie-Schalter (standby-off mechanism): | |
| − | + | 1. Grund: Wenn der roboter nicht innerhalb von 5 min startet,sollte der Akku abgeschaltet werden, um Strom zu sparen. | |
| − | + | 2. Grund: Moderne Akkus sollten nicht komplett entladen werden. Wenn der Roboter aus irgend einem Grund nicht aufgeladen werden kann und die Akkuspannung unter einen bestimmten Grenzwert fällt, sollte er in der Lage sein, sich selbst abzuschalten (Unterspannungsschutz) | |
| − | + | Ideen: | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| + | # Der vorhandene START/POWER-Taster wird gedrückt. Das schaltet für die Zeit des Drückens den MOSFET ein | ||
| + | # Der Arduino startetund schaltet sofort ebenfalls den MOSFET ein (über Arduino pinBatterySwitch) | ||
| + | # Wenn Unterspannung festgestellt wird, schaltet der Arduino den MOSFET aus (über Arduino pinBatterySwitch) | ||
| + | # Der Not-Aus-Taster wird weiterhin zum kompletten Ein-/Aus-Schalten benutzt | ||
| + | # POWER/START-Taster: schaltet die Betriebsspannung ein (erstes Drücken für 1s), startet den Roboter im Auto-Mode(zweites Drücken für 1s) | ||
<gallery> | <gallery> | ||
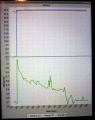
| − | File: Ardumower_current.png | Ardumower | + | File: Ardumower_current.png | Ardumower Motor-Einschaltstrom gesamt |
| − | File: BATTERY_CIRCUIT3.png | | + | File: BATTERY_CIRCUIT3.png | Akku-Abschalt-Schaltung |
| − | File: BATTERY_CIRCUIT3_PCB.jpg | | + | File: BATTERY_CIRCUIT3_PCB.jpg | Akku-Abschalt Lochrasterplatte |
| − | File: Battery_switch_pcb_circuit.png | Ardumower | + | File: Battery_switch_pcb_circuit.png | Anderungen an der Ardumower Leiterplatte |
File: Battery_switch_pcb.jpg | Ardumower PCB modification | File: Battery_switch_pcb.jpg | Ardumower PCB modification | ||
File: Improved_battery_charging_circuit_idea.png | Idea for future PCB | File: Improved_battery_charging_circuit_idea.png | Idea for future PCB | ||
Version vom 14. Juli 2015, 11:29 Uhr
Inhaltsverzeichnis
Grundprinzip
Der Roboter findet seine Ladestation, wo er wieder aufgeladen wird mit Hilfe der Perimeter-Schleife. Er fährt also solange in Uhrzeiger-Richtung an der Schleife entlang bis er eine Ladespannung an den Ladeanschlüssen feststellt. Hier stoppt der Roboter und lädt seinen Akku wieder auf.

Perimeter-Schleife unter der Ladestation

Komponenten der Ladestation

Ladestation

Sony Konion 7S2P Akkupack (29.4V, 4500 mAh)



Ladegerät
wir benutzen ein Lithium Ion e-bike Ladegerät (29.4V, 1.5A Ladestrom-Begrenzung) das über den Marotronics-Shop shop ![]() bezogen werden kann . Das Ladegerät wird in einem geschützten Bereich untergebracht (z.B. im Haus) und mit der Ladestation verbunden. Das Ladegerät sollte folgendes leisten( hier für Lithium-Ionen-Zellen, bei Bleiakkus ist es ähnlich aber weniger kritisch):
bezogen werden kann . Das Ladegerät wird in einem geschützten Bereich untergebracht (z.B. im Haus) und mit der Ladestation verbunden. Das Ladegerät sollte folgendes leisten( hier für Lithium-Ionen-Zellen, bei Bleiakkus ist es ähnlich aber weniger kritisch):
- Laden des Akkupacks über dei Ladeanschlüsse des Roboters
- Einhaltung der maximalen Ladespannung (Ladeschluss-Spannung)
- Einhaltung dess maximalen Ladestroms (Ladestrom-Begrenzung)
Wenn du ein vorhandenes Ladegerät benutzt, sind diese Anforderungen mit höchstwahrscheinlich erfüllt.
Leistungsbilanz
- 2 x Getriebemotor jeder 1A (unter Last): 2A, 27V (gemessen mit max. 80% Genauigkeit des Motortreibers)
- 1 x Mähmotor 1A (unter normaler Last): 1A, 27V (gemessen mit max. 80% Genauigkeit des Motortreibers)
- Board: 1A, 5 Volt (nicht gemessen)
Insgesamt: 3A * 27V + 1A * 5V = 81W + 5W = 86W
Akku
Als Akku wird ein 'Sony Konion 7S2P' Lithium Ion Akkupack (Sony Konion US18650V3 2250 mAh cells, Li-Mn), 29.4V x 4500 mAh = 132 Wh, 500 Ladezyklen, 126 x 36 x 65 mm (LBH) verwendet.
Die Mähzeit beträg mit den Ardumower-Motoren ungefähr 1,5 Stunden (132 Wh / 86W).
Akku Lade-/Entladebedingungen für optimale Lebensdauer:
- Ladeschlussspannung pro Zelle: max 4.15V ( 0.3A - 0.1A Rest-Ladestrom)
- minimale Entladespannung: min 3.1V
Standby-Aus/ Unterspannungsschutz
Es gibt zwei Gründe für einen Batterie-Schalter (standby-off mechanism):
1. Grund: Wenn der roboter nicht innerhalb von 5 min startet,sollte der Akku abgeschaltet werden, um Strom zu sparen.
2. Grund: Moderne Akkus sollten nicht komplett entladen werden. Wenn der Roboter aus irgend einem Grund nicht aufgeladen werden kann und die Akkuspannung unter einen bestimmten Grenzwert fällt, sollte er in der Lage sein, sich selbst abzuschalten (Unterspannungsschutz)
Ideen:
- Der vorhandene START/POWER-Taster wird gedrückt. Das schaltet für die Zeit des Drückens den MOSFET ein
- Der Arduino startetund schaltet sofort ebenfalls den MOSFET ein (über Arduino pinBatterySwitch)
- Wenn Unterspannung festgestellt wird, schaltet der Arduino den MOSFET aus (über Arduino pinBatterySwitch)
- Der Not-Aus-Taster wird weiterhin zum kompletten Ein-/Aus-Schalten benutzt
- POWER/START-Taster: schaltet die Betriebsspannung ein (erstes Drücken für 1s), startet den Roboter im Auto-Mode(zweites Drücken für 1s)
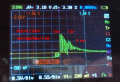
Ardumower Motor-Einschaltstrom gesamt
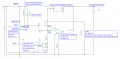
Akku-Abschalt-Schaltung

Akku-Abschalt Lochrasterplatte
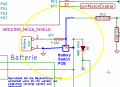
Anderungen an der Ardumower Leiterplatte

Ardumower PCB modification
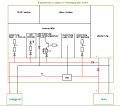
Idea for future PCB






BOM: 1x IRF9540N P-MOSFET T1 (or IRF5210) 1x BC337 NPN T2 1x Zener Diode 15V ZD15 Z1 2x Diode 1N4148 D2, D3 2x Diode 1N5819 50V D1, D4 1x 22 uF C1 1x 1k R4 2x 10k (R3, R8) 1x 30k R6 2x 100k (R2, R7)
Robot charging
In the robot itself, the battery voltage is monitored (see diagram below). So it can be determined when the robot must go to the charging station. The robot and the voltage and the current during charging is controlled. So it can be determined whether the robot has reached the charger and when the battery is fully charged again.
robot charging circuit:
Robot charging (+)---+------+-- relais ---- current sensor ----- battery (+)
|
---- voltage sensing
Robot charging (-)-- +------------------------------------------ battery (-)
Charging station
Ideally, the charging station also powers the perimeter loop sender.
charging station circuit:
AC power supply => Charger 24V (+)----- Charging station charger pin(+)
GND (-)----- Charging station charger pin(-)
Charger 24V (+)----- DC-DC converter 12V => Perimeter sender MC motor driver
=> Perimeter sender Arduino Nano Vin
Charge monitoring/Battery settings
Via pfodApp (Android) you can monitor the charging process.
Charging plot

Battery settings

Battery fully charged

Charging with timeout




Charging station ideas





Charging contacts








Videos