Motor-Treiber: Unterschied zwischen den Versionen
(→Bauanleitung Motortreiber (MC33926)) |
(→Radmotoren anschliessen) |
||
| Zeile 9: | Zeile 9: | ||
Der Ardumower verwendet wie alle modernen Systeme 24V Motoren. | Der Ardumower verwendet wie alle modernen Systeme 24V Motoren. | ||
| − | = Radmotoren | + | = Radmotoren = |
<gallery> | <gallery> | ||
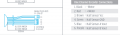
File: ardumower_motor.jpg | Ardumower Getriebemotor(Welle: 8mm Durchmesser, 5900 U/min, 0.055 Nm, Übersetzung: 1:212, Ausgangs-Drehmoment 2.45Nm, Ausgangsdrehzahl 31 U/min) | File: ardumower_motor.jpg | Ardumower Getriebemotor(Welle: 8mm Durchmesser, 5900 U/min, 0.055 Nm, Übersetzung: 1:212, Ausgangs-Drehmoment 2.45Nm, Ausgangsdrehzahl 31 U/min) | ||
| Zeile 25: | Zeile 25: | ||
* Der eingebaute Encoder kann die Drehzahl messen, die Geschwindigkeit und den Weg feststellen. | * Der eingebaute Encoder kann die Drehzahl messen, die Geschwindigkeit und den Weg feststellen. | ||
* 24V (Laststrom ca. 1A) | * 24V (Laststrom ca. 1A) | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
= Reduzierung der Motorstörungen = | = Reduzierung der Motorstörungen = | ||
Version vom 30. Mai 2016, 16:53 Uhr
Inhaltsverzeichnis
Zusammenfassung
Das Ardumower- Design verwendet zwei verschiedene Typen von Motoren. Alle Motoren können im Shop ![]() ) erworben werden:
) erworben werden:
- Zwei Getriebemotoren als Antriebe (Radmotoren) mit Encoder(für Weg- und Geschwindigkeitssteuerung)
- einen Motor (mit hoher Drehzahl) zum Mähen (Mähmotor)
Zur Steuerung der Motoren sind Motortreiber erforderlich. Desweiteren messen wir den Motorstrom mit dem Motortreiber. Dies erlaubt uns, Hindernisse zu detektieren, da der Motorstrom bei Hindernissen ansteigt. Ardumower verwendet zwei Dual MC33926 Motortreiber. Zwei Kanäle für linker und rechter Motor und zwei Kanäle (parallel geschaltet) für den Mähmotor.
Spannungen
Der Ardumower verwendet wie alle modernen Systeme 24V Motoren.
Radmotoren

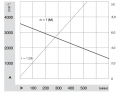
Ardumower Getriebemotor(Welle: 8mm Durchmesser, 5900 U/min, 0.055 Nm, Übersetzung: 1:212, Ausgangs-Drehmoment 2.45Nm, Ausgangsdrehzahl 31 U/min)
Motor wiring
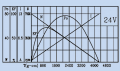
Ardumower Getriebemotor Kennlinie (nur Motor)


Die beiden Getriebemotoren werden unabhängig voneinander gesteuert ('Differentialantrieb') :
- Fahren vorwärts/rückwärts
- Lenken links/rechts
Die Eigenschaften der Ardumower - Radmotoren:
- Eine Drehzahl bis zu 31 U/min erlaubt es, den Roboter mit einer ausreichenden Geschwindigkeit von bis zu (Meter/sec = 31rpm/60 * PI * 0.25m = 0.4m/sec) bei Verwendung von Rädern mit 250 mm Durchmesser, zu bewegen.
- ein hohes Drehmoment (2.45 Nm) garantiert, dass der Roboter kleinere Hügel bis zu 14 Grad erklimmen kann (mit 2 Motoren, 250 mm Rädern, 31 U/min = 0.4m/s, Beschleunigung = 0.2 ( 1/2 der Nominalgeschwindigkeit) see calculator
- Der eingebaute Encoder kann die Drehzahl messen, die Geschwindigkeit und den Weg feststellen.
- 24V (Laststrom ca. 1A)
Reduzierung der Motorstörungen
Folgende Anleitung zeigt wie Du Motorstörungen reduzieren kannst.

Reduzierung der Motorstörungen

Protector PCB
![]() Protektorboard: Bei 24V Systemen kommt es zu Spannungsspitzen, die den Motortreiber schnell zerstören können. Daher wurde das Protektorboard entwickelt um dies zu verhindern. Es werden 2 Stück benötigt. Einen für die Antriebsräder und einen für den Mähmotor. Schaden kann das Protektorboard auf keinen Fall.
Protektorboard: Bei 24V Systemen kommt es zu Spannungsspitzen, die den Motortreiber schnell zerstören können. Daher wurde das Protektorboard entwickelt um dies zu verhindern. Es werden 2 Stück benötigt. Einen für die Antriebsräder und einen für den Mähmotor. Schaden kann das Protektorboard auf keinen Fall.

Protector PCB
Protector PCB wiring


Bauanleitung Motortreiber (MC33926)
Eigenschaften des Motortreibers: bis zu 3A, mit integriertem Stromsensor und Thermoschutz

PCB and MC33926

Pin-Belegung

Jumper

Schaltbild MC33926




Hier findet Ihr eine Anleitung wie der Motortreiber auf das PCB gesetzt wird.
- Building video: Dual MC33926
- also see: Documentation in Github
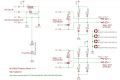
Der Motor wird wie folgt angeschlossen:
Odometrie Anschluss
Motor wiring
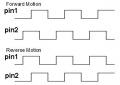
Encoder signal

Motor odometry wiring (left motor):
Motor (brown) ---- PCB VCC Motor (green) ---- PCB GND Motor (blue) ---- PCB OdometryLeft (3) Motor (purple) ---- PCB OdometryLeft (4)
For right motor, use PCB OdometryRight accordingly.
IMPORTANT: PCB v0.5/1.2 are missing pull-ups! You need to add them yourself:
PCB OdometryLeft(3) --- 4.7k --- 5v PCB OdometryLeft(4) --- 4.7k --- 5v
Mähmotor und Treiber

Ardumower Mähmotor
Ardumower Mähmotor -Kennlinie
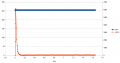
Anlaufstrom
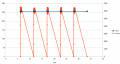
Mähmotor blockiert, 500ms detection (max), waittime: 5sec (min)




Eigenschaften des Ardumower-Mähmotors:
- schnell genug um den Rasen zu schneiden (3150 U/min)
- genügend Drehmoment (140 mNm / 46 W)
- leises Mähen (man hört ihn kaum)
- 24V, Laststrom ~1.0A (L=2.8mH, R=1.9ohm)
Es wird ein MC33926 Motortreiber in Parallelschaltung zur Ansteuerung des Mähmotors verwendet.
![]() Sicherheitshinweis: Entferne zur Sicherheit stets die Messer bei diesen ersten Tests!
Sicherheitshinweis: Entferne zur Sicherheit stets die Messer bei diesen ersten Tests!
Motor wiring (mower motor):
Motor (black) ==== MC33926 M1OUT1 Motor (red) ==== MC33926 M1OUT2
Motor controller (PID)
The speed of the motors is controlled by a software PID controller. You can monitor the quality of the motor speed control via pfodApp (Plot->Motor control):
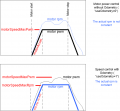
Motor speed settings


