Echtzeit-Uhr
Inhaltsverzeichnis
Echtzeit-Uhr (RTC)
Damit der Roboter automatisch zu unterschiedlichen Zeitintervallen mit dem Mähen beginnen kann, benötigt er eine interne Uhr.(Timer).
eine Echtzeituhr (RTC) liefert ständig die aktuelle Zeit (Minute, Stunde) und das aktuelle Datum (Wochentag, Tag, Monat, Jahr).Mit Hilfe der eingebauten Batterie läuft die Uhrzeit weiter auch wenn der Roboter ausgeschaltet ist.
Zusätzlich enthält das RTC-Modul noch einen EEPROM-Speicher (nicht flüchtigen Speicher), der 4k Benutzerdaten dauerhaft speichern kann.
Example: DS1307

DS1307
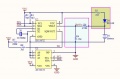
DS1307_Schaltbild


Anschluss
Das RTC-Modul ist über den I2C-Bus mit dem Arduino Mega (parallel mit einigen anderen Modulen) verbunden.
DS1307 Module SDA — Arduino SDA Pin DS1307 Module SCL — Arduino SCL Pin DS1307 Module VCC (+5V) — Arduino VCC (+5V) DS1307 Module GND — Arduino GND
Beachte
Wenn Kommunikationsprobleme beim Betrieb mehrerer Module am I2C-Bus auftreten, ist es empfehlenswert, die Kabellänge zu verringern.
Timer
Am Roboter können verschiedene Timer programmiert werden (über Android pfodApp). Für jeden Timer kann ein Zeitintervall ('Zeitfenster') für die gewünschten Tage definiert werden. Solange die aktuelle Zeit sich innerhalb irgend eines Zeitfensters befindet, solange kann der Roboter frei mähen, laden, mähen, laden usw.
Example:
Timer 1: 08:00 - 13:00 Monday, Thuesday, Wednesday
Timer 2: 14:00 - 16:00 every day
Timer 3: off
Timer 4: off