PID control ru: Unterschied zwischen den Versionen
Aus www.wiki.ardumower.de
(→Abstract) |
(→PID controller) |
||
| Zeile 7: | Zeile 7: | ||
* ... | * ... | ||
| − | = | + | =ПИД регулятор= |
| − | + | Пропорционально-интегро-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования. | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
<gallery> | <gallery> | ||
Version vom 23. August 2015, 14:50 Uhr
Описание
Ardumower использует цифровой ПИД-регулятор для
- Отслеживания курса движения
- Отслеживание периметра
- Управление скоростью моторов
- ...
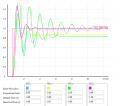
ПИД регулятор
Пропорционально-интегро-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
Examples

Velocity PID
The standard form is most used for position control. If you derivate the standard form, you obtain the velocity form:

velocity PID
