Ardumower Sunray: Unterschied zwischen den Versionen
Aus www.wiki.ardumower.de
(→User interface (for testing/development)) |
(→=Important settings) |
||
| Zeile 21: | Zeile 21: | ||
[[File: Sunray.png|600px]] | [[File: Sunray.png|600px]] | ||
| − | ==Important settings= | + | ==Important settings== |
String comPort = "COM9"; | String comPort = "COM9"; | ||
String logFile = "outdoor_mow_rand.log"; // if file exists, playback mode, otherwise record mode | String logFile = "outdoor_mow_rand.log"; // if file exists, playback mode, otherwise record mode | ||
Version vom 29. April 2017, 16:19 Uhr
Inhaltsverzeichnis
Requirements
- PCB 1.3 (incl. MC33926 motor drivers)
- Arduino Due
- IMU GY-88 (MPU6050, HMC5883L)
- 2 perimeter coils (left, right), perimeter sender
- motors using odometry
- Bluetooth module
Code
https://github.com/Ardumower/Sunray
Compass calibration
- Install IMU module 35cm away from metal parts. Use 1m cable so you can move the module out of robot for calibration. Do no use metal parts (screws etc.) within 5cm of the module - use plastic screws. Fixate everything within 5cm of the module. A small movement of a cable etc. will make the calibration useless.

- Move IMU out of robot and power-on robot.
- On the PC, start 'processing_mag'.
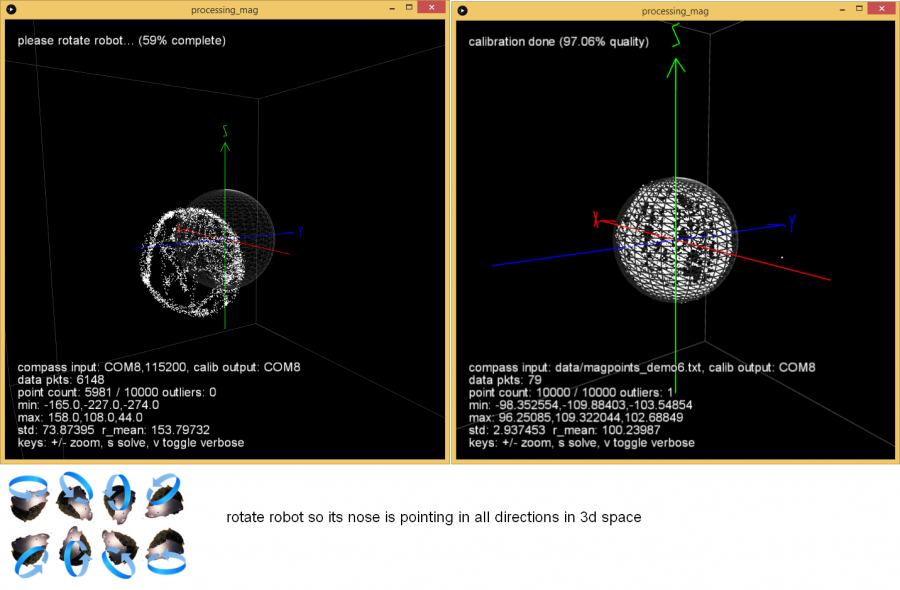
- Ensure there is at least >1m to all metal parts in the surrouding.
- Rotate IMU module slowly into all directions and collect > 20,000 measurements. Calibration ist performed transmitted continously to robot (robot confirms with a tone).
- Install IMU module in the robot at least 35cm away from metal parts.


User interface (for testing/development)
- On the PC, start 'processing_sunray'. The robot's sensors should be shown. At start (and every 3 minutes), the robot calibrates the Gyro and calibration status is shown in the user interface. After this is completed, you can verify the compass calibration by rotating the robot using the green joystick shown on the screen. Compass yaw and gyro yaw should be same up to 3 degree.

Important settings
String comPort = "COM9"; String logFile = "outdoor_mow_rand.log"; // if file exists, playback mode, otherwise record mode
Mapping
- On the PC start 'processing_sunray' and connect to robot via Bluetooth.
- Put robot on perimeter, as close as possible to charging station (for anti-clockwise tracking).
- On the PC, choose 'track anti-clockwise' and 'mapping is ON'.
- Let robot track perimeter until it returns at the other side of charging station.
- Press 'mapping is OFF'. The map will be generated.
Localization
Random mowing
- On the PC, choose 'mow rand'
Demo video: https://www.youtube.com/watch?v=tZMAjvR4nxU
Lane-by-lane mowing
- On the PC, choose 'mow lane'
Demo video: https://www.youtube.com/watch?v=T0yondeM3fY
Perimeter tracking
- On the PC, choose 'track'
Demo video: https://www.youtube.com/watch?v=rNuw9vNcYpM