Charging
Inhaltsverzeichnis
Basic principle
By the help of the perimeter wire loop, the robot finds its charging station where it can be charged again. So, it drives along the perimeter wire (in clock-wise direction) until it detects a charging voltage at its charging pins. There the robot stops and recharges its battery.

Perimeter wire below charging station

Charging station components

Charging station

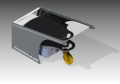
Sony Konion 7S2P battery pack (29.4V, 4500 mAh)



Charger
For the charger, we are using a Lithium Ion e-bike charger (29.4V, 1.5A current limitting) that can be purchased via the shop ![]() . The charger is placed in a protected area (house etc.) and connected to the robot charging station. The charger should accomplish the following things (in this case Lithium-Ion, lead battery is similar, but less critical):
. The charger is placed in a protected area (house etc.) and connected to the robot charging station. The charger should accomplish the following things (in this case Lithium-Ion, lead battery is similar, but less critical):
- Charge battery pack via the charging pins of the robot
- Maximum cutoff voltage / charge voltage compliance (charging voltage limit)
- Maximum charging current compliance (charging current limit)
If you are using an existing charger, these things are implemented with high probability already in it.
Total power balance
- 2 x Gear motors each 1A (under heavy load): 2A, 27 volt (measured at max. 80% accuracy by motor drivers)
- 1 x Mower motor 1A (under normal load): 1A, 27 volt (measured at max. 80% accuracy by motor drivers)
- PCB: 1A, 5 volt (not measured by PCB)
Total: 3A * 27v + 1A * 5v = 81W + 5W = 86W
Battery
For the battery, we are using a 'Sony Konion 7S2P' Lithium Ion battery pack (Sony Konion US18650V3 2250 mAh cells, Li-Mn), 29.4V x 4500 mAh = 132 Wh, 500 recharge cycles, 126 x 36 x 65 mm (LBH).
Using this battery with the Ardumower motors, the mowing time is about 1.5 hours (132 Wh / 86W).
battery charge/discharge conditions for optimal battery life time:
- charging per cell: max 4.15v (0.3A - 0.1A charging cutt-off)
- discharging per cell: min 3.1v
Standby-off / Under-voltage protection
There are two reasons for a battery switch (standby-off mechanism):
Reason1: If the robot was not started within 5 minutes, it should turn battery off to save energy.
Reason2: Modern batteries should not be completely discharged. When the robot isn't able to charge for some reason and when the battery is below a certain threshold, it should be able to switch off the battery itself (undervoltage protection)
Idea:
- User presses existing START/POWER button, that switches on the MOSFET for the time of pressing
- Arduino starts and immediately also switches on MOSFET (via Arduino pinBatterySwitch)
- If undervoltage detected, Arduino switches off MOSFET (via Arduino pinBatterySwitch)
- Emergy button is still used for completely switching ON/OFF power
- POWER/START button: switches-on operation voltage (1st one second press), starts robot in automatic mode (2nd one second press)
Ardumower complete system motor start current
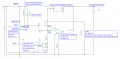
Battery switch-off circuit

Battery switch-off PCB
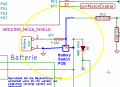
Ardumower PCB modification circuit

Ardumower PCB modification





BOM: 1x IRF9540N P-MOSFET T1 (or IRF5210) 1x BC337 NPN T2 1x Zener Diode 15V ZD15 Z1 2x Diode 1N4148 D2, D3 2x Diode 1N5819 50V D1, D4 1x 22 uF C1 1x 1k R4 2x 10k (R3, R8) 1x 30k R6 2x 100k (R2, R7)
Robot charging
In the robot itself, the battery voltage is monitored (see diagram below). So it can be determined when the robot must go to the charging station. The robot and the voltage and the current during charging is controlled. So it can be determined whether the robot has reached the charger and when the battery is fully charged again.
robot charging circuit:
Robot charging (+)---+------+-- relais ---- current sensor ----- battery (+)
|
---- voltage sensing
Robot charging (-)-- +------------------------------------------ battery (-)
Charging station
Ideally, the charging station also powers the perimeter loop sender.
charging station circuit:
AC power supply => Charger 24V (+)----- Charging station charger pin(+)
GND (-)----- Charging station charger pin(-)
Charger 24V (+)----- DC-DC converter 12V => Perimeter sender MC motor driver
=> Perimeter sender Arduino Nano Vin
Charge monitoring/Battery settings
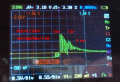
Via pfodApp (Android) you can monitor the charging process.
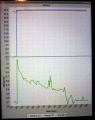
Charging plot

Battery settings

Battery fully charged

Charging with timeout




Charging station ideas





Charging contacts






Videos