Charging ru: Unterschied zwischen den Versionen
(→Charge monitoring/Battery settings) |
(→В режиме ожидания / Защита от пониженного напряжения) |
||
| (4 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 39: | Zeile 39: | ||
* Разрядки каждой ячейки: мин 3.1V | * Разрядки каждой ячейки: мин 3.1V | ||
| − | = | + | =В режиме ожидания / Защита от пониженного напряжения= |
| − | + | ||
| − | + | Есть две причины для выключения питания аккумулятора (механизм перехода в режим ожидания): | |
| − | + | Причина 1: Если робот не был запущен в режим кошения в течение 5 минут после подачи питания на плату, то следует отключить аккумулятор, чтобы сэкономить энергию. | |
| − | + | Причина 2: Современные батареи не должны быть полностью разряжены. Когда робот не может заряжаться по какой-то причине, и когда батареи ниже определенного порога, он должен быть в состоянии сам отключить аккумулятор (защита от пониженного напряжения) | |
| + | |||
| + | Идея: | ||
| + | |||
| + | # Пользователь нажимает кнопку Пуск/Питание, которая переключает MOSFET на время нажатия | ||
| + | # Ардуино стартует и сразу же переключает на MOSFET (через Ардуино pinBatterySwitch) | ||
| + | # Если обнаруживается низкое напряжение, то Arduino выключает MOSFET, тем самым отключая себе питание | ||
| + | # Кнопка аварийного выключения используется для полного включения и выключения питания | ||
| + | # Кнопка Пуск/Питание включает рабочее напряжение (первое секундное нажатие), запускает робота в автоматическом режиме (второе секундное нажатие) | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
<gallery> | <gallery> | ||
| Zeile 63: | Zeile 65: | ||
</gallery> | </gallery> | ||
| − | + | Список элементов: | |
1x IRF9540N P-MOSFET T1 (or IRF5210) | 1x IRF9540N P-MOSFET T1 (or IRF5210) | ||
1x BC337 NPN T2 | 1x BC337 NPN T2 | ||
| Zeile 75: | Zeile 77: | ||
2x 100k (R2, R7) | 2x 100k (R2, R7) | ||
| − | = | + | =Зарядка робота= |
| − | + | В самом роботе контролируется напряжение на аккумуляторе (смотрите схему ниже). Робот может определить, когда робот нужно идти к зарядной станции. Напряжение и ток во время зарядки так же контролируются. Соответсвенно, робот понимает, достиг ли он зарядной станции и когда снова батарея полностью заряжена. | |
| − | + | Цепь зарядки: | |
<blockquote style="background-color: lightgrey; border: solid thin grey;"> | <blockquote style="background-color: lightgrey; border: solid thin grey;"> | ||
<pre> | <pre> | ||
| − | + | Контакт зарядки на роботе (+)---+------+-- реле ---- датчик тока ----- батарея (+) | |
| − | + | | | |
| − | + | ---- датчик напряжения | |
| − | + | Контакт зарядки на роботе (-)---+------------------------------------- батарея (-) | |
</pre> | </pre> | ||
</blockquote> | </blockquote> | ||
| − | = | + | =Подключение зарядной станции= |
| − | + | ||
| − | + | ||
| − | + | В идеале зарядное устройство так же питает плату генератора сигнала периметра. | |
<blockquote style="background-color: lightgrey; border: solid thin grey;"> | <blockquote style="background-color: lightgrey; border: solid thin grey;"> | ||
<pre> | <pre> | ||
| − | + | Сеть 220 вольт => Зарядное устройство 24V (+)----- Контактный вывод на зарядной станции (+) | |
| − | GND | + | GND (-)----- Контактный вывод на зарядной станции (-) |
| − | + | Зарядное устройство 24V (+)----- DC-DC преобразователь 12V => Генератор сигнала периметра => Усилитель (драйвер мотора) | |
| − | + | => Генератор сигнала периметра питание Arduino Nano (Vin) | |
</pre> | </pre> | ||
</blockquote> | </blockquote> | ||
| − | = | + | =Мониторинг зарядки и настройки батареи= |
Через pfodApp (андроид) вы можете контролировать процесс зарядки. | Через pfodApp (андроид) вы можете контролировать процесс зарядки. | ||
<gallery> | <gallery> | ||
Aktuelle Version vom 22. August 2015, 22:43 Uhr
Inhaltsverzeichnis
Основной принцип
С помощью проволочной петли по периметру робот находит свою зарядную станцию, где он может быть заряжен снова. Он едет по проводу периметра (по часовой стрелке) до тех пор, пока не обнаружит напряжение на своих зарядных контактах. Там робот останавливается и заряжает батарею.

Схема провода периметра от зарядной станции

Компоненты станции

Зарядная станция

Батарея Sony Konion 7S2P (29.4V, 4500 mAh)



Зарядное устройство
Используется зарядное устройство литиево-ионных аккумуляторов для электровелосипедов (29.4 в, 1,5 A), который можно приобрести через магазин ![]() . Зарядное устройство помещается в охраняемой и сухой зоне (дом и т. д.) и подключено к зарядной станции робота. Зарядное устройство должно выполнять следующие вещи (в данном случае литий-ионных, свинцовая батарея аналогично, но менее критично):
. Зарядное устройство помещается в охраняемой и сухой зоне (дом и т. д.) и подключено к зарядной станции робота. Зарядное устройство должно выполнять следующие вещи (в данном случае литий-ионных, свинцовая батарея аналогично, но менее критично):
- Зарядка аккумулятора через зарядную штыри робота
- Максимальное напряжение отсечки / соответствие напряжения зарядки (ограничить напряжение зарядки)
- Максимальное соответствие зарядного тока (ограничить зарядный ток)
Если вы используете заводское зарядное устройство, эти вещи реализованы в нем с высокой вероятностью.
Расчет общей мощности
- 2 моторедуктора, под нагрузкой каждый по 2A, 27 вольт (измерено при 80% ШИМ).
- 1 х двигатель косилки, под нагрузкой 1A, 27 вольт (измерено при 80% ШИМ).
- Печатная плата: 1A, 5 вольт (среднепотолочное)
Всего: 3A * 27В + 1A * 5В = 81W + 5W = 86W
Батарея
Мы используем батарею "Sony Konion 7S2P" из 8 литий-ионных аккумуляторов (Sony Konion US18650V3 2250 mAh cells, Li-Mn), 29.4 в x 4500 мАч = 132 Вт * ч, 500 циклов перезарядки, 126 х 36 х 65 мм.
Используя эту батарею с моторами Ardumower время скашивания составляет около 1,5 часов (132 Вт · ч / 86W).
Условия заряда/разряда этого аккумулятора для оптимального времени жизни батареи:
- Зарядки каждой ячейки: макс 4.15v (0.3A - 0.1A зарядки Cutt-офф)
- Разрядки каждой ячейки: мин 3.1V
В режиме ожидания / Защита от пониженного напряжения
Есть две причины для выключения питания аккумулятора (механизм перехода в режим ожидания):
Причина 1: Если робот не был запущен в режим кошения в течение 5 минут после подачи питания на плату, то следует отключить аккумулятор, чтобы сэкономить энергию.
Причина 2: Современные батареи не должны быть полностью разряжены. Когда робот не может заряжаться по какой-то причине, и когда батареи ниже определенного порога, он должен быть в состоянии сам отключить аккумулятор (защита от пониженного напряжения)
Идея:
- Пользователь нажимает кнопку Пуск/Питание, которая переключает MOSFET на время нажатия
- Ардуино стартует и сразу же переключает на MOSFET (через Ардуино pinBatterySwitch)
- Если обнаруживается низкое напряжение, то Arduino выключает MOSFET, тем самым отключая себе питание
- Кнопка аварийного выключения используется для полного включения и выключения питания
- Кнопка Пуск/Питание включает рабочее напряжение (первое секундное нажатие), запускает робота в автоматическом режиме (второе секундное нажатие)
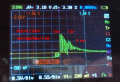
Ardumower complete system motor start current
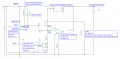
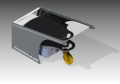
Battery switch-off circuit

Battery switch-off PCB
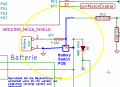
Ardumower PCB modification circuit

Ardumower PCB modification
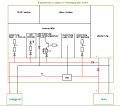
Idea for future PCB






Список элементов: 1x IRF9540N P-MOSFET T1 (or IRF5210) 1x BC337 NPN T2 1x Zener Diode 15V ZD15 Z1 2x Diode 1N4148 D2, D3 2x Diode 1N5819 50V D1, D4 1x 22 uF C1 1x 1k R4 2x 10k (R3, R8) 1x 30k R6 2x 100k (R2, R7)
Зарядка робота
В самом роботе контролируется напряжение на аккумуляторе (смотрите схему ниже). Робот может определить, когда робот нужно идти к зарядной станции. Напряжение и ток во время зарядки так же контролируются. Соответсвенно, робот понимает, достиг ли он зарядной станции и когда снова батарея полностью заряжена.
Цепь зарядки:
Контакт зарядки на роботе (+)---+------+-- реле ---- датчик тока ----- батарея (+)
|
---- датчик напряжения
Контакт зарядки на роботе (-)---+------------------------------------- батарея (-)
Подключение зарядной станции
В идеале зарядное устройство так же питает плату генератора сигнала периметра.
Сеть 220 вольт => Зарядное устройство 24V (+)----- Контактный вывод на зарядной станции (+)
GND (-)----- Контактный вывод на зарядной станции (-)
Зарядное устройство 24V (+)----- DC-DC преобразователь 12V => Генератор сигнала периметра => Усилитель (драйвер мотора)
=> Генератор сигнала периметра питание Arduino Nano (Vin)
Мониторинг зарядки и настройки батареи
Через pfodApp (андроид) вы можете контролировать процесс зарядки.
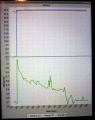
Диаграмма зарядки

Настройки батареи

Батарея полностью заряжена

Зарядка с тайм-аутом




Идеи зарядной станции




Charging contacts






