Charging ru
Inhaltsverzeichnis
Основной принцип
С помощью проволочной петли по периметру робот находит свою зарядную станцию, где он может быть заряжен снова. Он едет по проводу периметра (по часовой стрелке) до тех пор, пока не обнаружит напряжение на своих зарядных контактах. Там робот останавливается и заряжает батарею.

Схема провода периметра от зарядной станции

Компоненты станции

Зарядная станция

Батарея Sony Konion 7S2P (29.4V, 4500 mAh)



Зарядное устройство
Используется зарядное устройство литиево-ионных аккумуляторов для электровелосипедов (29.4 в, 1,5 A), который можно приобрести через магазин ![]() . Зарядное устройство помещается в охраняемой и сухой зоне (дом и т. д.) и подключено к зарядной станции робота. Зарядное устройство должно выполнять следующие вещи (в данном случае литий-ионных, свинцовая батарея аналогично, но менее критично):
. Зарядное устройство помещается в охраняемой и сухой зоне (дом и т. д.) и подключено к зарядной станции робота. Зарядное устройство должно выполнять следующие вещи (в данном случае литий-ионных, свинцовая батарея аналогично, но менее критично):
- Зарядка аккумулятора через зарядную штыри робота
- Максимальное напряжение отсечки / соответствие напряжения зарядки (ограничить напряжение зарядки)
- Максимальное соответствие зарядного тока (ограничить зарядный ток)
Если вы используете заводское зарядное устройство, эти вещи реализованы в нем с высокой вероятностью.
Расчет общей мощности
- 2 моторедуктора, под нагрузкой каждый по 2A, 27 вольт (измерено при 80% ШИМ).
- 1 х двигатель косилки, под нагрузкой 1A, 27 вольт (измерено при 80% ШИМ).
- Печатная плата: 1A, 5 вольт (среднепотолочное)
Всего: 3A * 27В + 1A * 5В = 81W + 5W = 86W
Батарея
Мы используем батарею "Sony Konion 7S2P" из 8 литий-ионных аккумуляторов (Sony Konion US18650V3 2250 mAh cells, Li-Mn), 29.4 в x 4500 мАч = 132 Вт * ч, 500 циклов перезарядки, 126 х 36 х 65 мм.
Используя эту батарею с моторами Ardumower время скашивания составляет около 1,5 часов (132 Вт · ч / 86W).
Условия заряда/разряда этого аккумулятора для оптимального времени жизни батареи:
- Зарядки каждой ячейки: макс 4.15v (0.3A - 0.1A зарядки Cutt-офф)
- Разрядки каждой ячейки: мин 3.1V
Standby-off / Under-voltage protection
There are two reasons for a battery switch (standby-off mechanism):
Reason1: If the robot was not started within 5 minutes, it should turn battery off to save energy.
Reason2: Modern batteries should not be completely discharged. When the robot isn't able to charge for some reason and when the battery is below a certain threshold, it should be able to switch off the battery itself (undervoltage protection)
Idea:
- User presses existing START/POWER button, that switches on the MOSFET for the time of pressing
- Arduino starts and immediately also switches on MOSFET (via Arduino pinBatterySwitch)
- If undervoltage detected, Arduino switches off MOSFET (via Arduino pinBatterySwitch)
- Emergy button is still used for completely switching ON/OFF power
- POWER/START button: switches-on operation voltage (1st one second press), starts robot in automatic mode (2nd one second press)
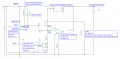
Ardumower complete system motor start current
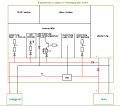
Battery switch-off circuit

Battery switch-off PCB
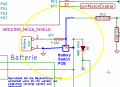
Ardumower PCB modification circuit

Ardumower PCB modification
Idea for future PCB






BOM: 1x IRF9540N P-MOSFET T1 (or IRF5210) 1x BC337 NPN T2 1x Zener Diode 15V ZD15 Z1 2x Diode 1N4148 D2, D3 2x Diode 1N5819 50V D1, D4 1x 22 uF C1 1x 1k R4 2x 10k (R3, R8) 1x 30k R6 2x 100k (R2, R7)
Robot charging
In the robot itself, the battery voltage is monitored (see diagram below). So it can be determined when the robot must go to the charging station. The robot and the voltage and the current during charging is controlled. So it can be determined whether the robot has reached the charger and when the battery is fully charged again.
robot charging circuit:
Robot charging (+)---+------+-- relais ---- current sensor ----- battery (+)
|
---- voltage sensing
Robot charging (-)-- +------------------------------------------ battery (-)
Charging station
Ideally, the charging station also powers the perimeter loop sender.
charging station circuit:
AC power supply => Charger 24V (+)----- Charging station charger pin(+)
GND (-)----- Charging station charger pin(-)
Charger 24V (+)----- DC-DC converter 12V => Perimeter sender MC motor driver
=> Perimeter sender Arduino Nano Vin
Charge monitoring/Battery settings
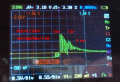
Via pfodApp (Android) you can monitor the charging process.
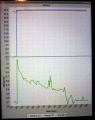
Charging plot

Battery settings

Battery fully charged

Charging with timeout




Идеи зарядной станции
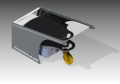




Charging contacts






