Motor-Treiber
Inhaltsverzeichnis
Zusammenfassung
Das Ardumower- Design verwendet zwei verschiedene Typen vo Motoren.Alle Motoren können im Shop shop ![]() ) erworben werden:
) erworben werden:
- Zwei Getriebemotoren als Antriebe (Radmotoren)
- einen Motor (mit hoher Drehzahl) zum Mähen (Mähmotor)
Zur Steuerung der Motoren sind Motortreiber erforderlich.
Spannungen
Obwohl es 12V- und 24V- Motoren gibt,verwendet der Ardumower wie alle modernen Systeme, 24V Motoren. Der Grund ist folgender:
Nehmen wir an, der Motor verbraucht 50W. Bei 24V ist der daraus resultierende Strom: 50W / 24V = 2A. Bei Verwendung von 12V resultiert daraus ein Strom von: 50W / 12V = 4A.
TJe höher der Strom (A), um so mehr Probleme treten auf:
- Der Motortreiber muss für höhere Ströme ausgelegt werden (teurer)
- die Leiterzüge uf der Platine müssen breiter sein (teurer)
- der Akku muss in der Lage sein, höhere Ströme zu liefern (teurer)
Aus diesen Gründen ist der Ardumower als ein 24V-System ausgelegt.
Radmotoren

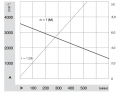
Ardumower Getriebemotor(Welle: 8mm Durchmesser, 5900 U/min, 0.055 Nm, Übersetzung: 1:212, Ausgangs-Drehmoment 2.45Nm, Ausgangsdrehzahl 31 U/min)
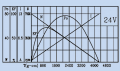
Ardumower Getriebemotor Kennlinie (nur Motor)

Reduzierung der Motorstörungen



Die beiden Getriebemotoren werden unabhängig voneinander gesteuert ('Differentialantrieb') :
- Fahren vorwärts/rückwärts
- Lenken links/rechts
Die Eigenschaften der Ardumower - Radmotoren:
- Eine Drehzahl bis zu 31 U/min erlaubt es, den Roboter mit einer ausreichenden Geschwindigkeit von bis zu (Meter/sec = 31rpm/60 * PI * 0.25m = 0.4m/sec) bei Verwendung von Rädern mit 250 mm Durchmesser, zu bewegen.
- ein hohes Drehmoment (2.45 Nm) garantiert, dass der Roboter kleinere Hügel bis zu 14 Grad erklimmen kann (mit 2 Motoren, 250 mm Rädern, 31 U/min = 0.4m/s, Beschleunigung = 0.2 ( 1/2 der Nominalgeschwindigkeit) see calculator
- Der eingebaute Encoder kann die Drehzahl messen (siehe Odometrie für weitere Informationen) - für die Ardumower-Software sind Encoder erforderlich.
- 24V (Laststrom ca. 1A)
Motortreiber
Ein Motortreiber ist eine elektronische Schaltung, die es ermöglicht, Strom durch den Motor in eine Richtung oder in die entgegengesetzte Richtung fliessen zu lassen - abhängig davon,ob der Motor vorwärts oder rückwärts fahren soll. (eine sog. 'H-Brücke'). Es gibt viele Motortreiber als Fertigplatinen, einige können zwei Motoren steuern (Dual H-Brücke) - wenn man 2 dieser Brücken parallel schaltet, kann man den max. Motorstrom erhöhen.
Wenn die Drehrichtung des Motors nicht gesteuert werden muss, (z.B. für die Messer), braucht man keine H-Brücke, statt dessen kann ein einfacher 'Schalter' (d.h. ein MOSFET-Transistor) verwendet werden.
Der Motortreiber ist über Steuersignale mit dem Arduino verbundeno. Beispiel:
Arduino Digital Pin —> MOTOR-Direction Pin (DIR) Arduino PWM Pin —> MOTOR-Speed Pin (PWM) Arduino Analog Pin <— MOTOR-Current Sensor Pin
ein Pin steuert die Drehrichtung (vorwärts/rückwärts), der andere Pin steuert die Geschwindigkeit. Ein analoger Eingangspin ist mit dem Stromsensor verbunden. die Stromsensor-Module (ACS712-05A) sind in Reihe mit dem motor geschaltet.
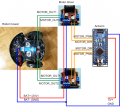
Bemerkung: nur zur Demonstration! die konkrete Schaltung siehe hier: schematics

PWM Frequenz
Die Geschwindigkeit der Motoren wird durch das Tastverhältnis eines pulsweiten-modulierten Signales gesteuert. Wir verwenden die Arduino Standart PWM Frequenz (490 Hz) zur Steuerung der Motortreiber.

Arduino PWM Tastverhältnis
PWM 490 Hz: Odometrie ticks, sense (Strom)
PWM 3.9 Khz: Odometrie ticks, sense (Strom)

PWM 20 Khz: Odometrie ticks, sense (Strom)
PWM 31 Khz: Odometrie ticks, sense (Strom)





verbreitete Module
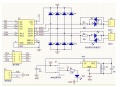
MC33926 (empfohlen)
Eigenschaften: bis zu 3A, mit integriertem Stromsensor und Thermoschutz, für alle Arten von Mähroboter

Pin-Belegung

Jumper

Schaltung
automatischer Strombegrenzer

Motorstart 50% PWM Tastverhältnis
Impuls/EMF Schutz





M1_FB --- pinMotorLeftSense A1 M1_SF --- pinMotorLeftFault 25 M1_PWM_D1 --- verbunden mit Jumper nach GND M1_PWM_D2 --- verbunden mit Jumper nach VDD M1_IN1 --- pinMotorLeftPWM 5 M1_IN2 --- pinMotorLeftDir 31 EN --- pinMotorEnable 37 M2_FB --- pinMotorRightSense A0 M2_SF --- pinMotorRightFault 27 M2_PWM_D1 --- verbunden mit Jumper nach GND M2_PWM_D2 --- verbunden mit Jumper nach VDD M2_IN1 --- pinMotorRightPWM 3 M2_IN2 --- pinMotorRightDir 33 EN --- pinMotorEnable 37 VDD --- Arduino 5V
L6201P

L6201P Platine

L6201P Datenblatt


Eigenschaften: 48V, 4A
B+ Ausgangsspannung der Srtomversorgung GND GND EN driver enable RPWM forward PWM signal, active HIGH LPWM reverse PWM signal, active HIGH CT current signal output VT voltage signal output
Forward EN=1, RPWM=PWM, LPWM=0 Reverse EN=1, RPWM=0, LPWM=PWM (auch möglich? EN=1, RPWM=255-PWM, LPWM=1 => muss noch getestet werden!) Brake EN=1, RPWM=0, LPWM=0 Not brake EN=0, RPWM=x, LPWM=x Bemerkung: 1=High level (3.3-5v), 0=Low level (0V oder GND)
L9958
Eigenschaften: Arduino 240W H-bridge Motortreiber-Board - SX8847, bis zu 8A
Beachte,dass diese Platine einen linearen Spannungsregler linear voltage regulator enthält,der Eingangsspannung (typisch 24 oder 12V)in 5V umwandelt. Einige module verwenden einen einzelnen Spannungsregler (chip VR1 auf dem Modul), oder zweistufig (VR1 und U2).
Die Konvertierung von 24V nach 5V mit einem linearen Spannungsregler ist sehr ineffizient (Eingangsstrom = Ausgangsstrom, wenn man z.B. 100mA bei 5V benötigt, braucht man auch 100mA bei 24V, so verliert man 1,9W in diesem Modul). Deshalb ist es empfehlenswert,den linearen Spannungsregler nicht zu benutzen und statt dessen die 5V aus einen Schaltregler zu beziehen.
L9958 GND---GND L9958 VCC---Arduino 5V L9958 EN---Arduino 5V L9958 DI---GND L9958 DIR---Arduino MOTOR_DIR L9958 PWM---Arduino MOTOR_PWM L9958 MOTOR(+)---motor(+) L9958 MOTOR(-)---motor(-) L9958 POWER(+)---battery(+) L9958 POWER(-)---battery(-)

L298N
Eigenschaften: bis zu 4A Bemerkung: bei der Verwendung des L298N-Motortreibers sollten beide H-Brücken (2A) parallel geschaltet werden, so dass beide H-Brückeneinen Motor treiben (max. 4A):
Parralelschaltung:
IN1 mit IN4 IN2 mit IN3 OUT1 mit OUT4 OUT2 mit OUT3
ENA und ENB sind mit einem Jumper versehen .

Treiberboard

Parallelschaltung für doppeltem Strom
Schaltung



Mower motor and driver

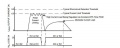
Ardumower mower motor
Ardumower mower motor curve
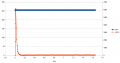
Mower start current
Mower blocked, 500ms detection (max), waittime: 5sec (min)




The Ardumower mower motor features:
- Fast enough to cut the lawn (3150 rpm)
- Enough torque (140 mNm / 46 W)
- Quiet mowing (you cannot hear it)
- 24V, load current ~1.0A (L=2.8mH, R=1.9ohm)
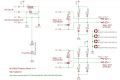
For a the mowing motor, a MOSFET circuit is used. The MOSFET transistor IRLIZ44N (alternatives: IRF1404, IRL540N, RFP30N06LE, FQP30N06L) can already switch a current of 30A at the Arduino 5V control signal (N-LogL). The 10K resistor pulls down to ground when the Arduino starts. The 180 Ohm resistor limits the current at the Gate caused by level switches to about 30mA. The diode (MBR1045) protects the circuit against current caused by motor induction. A current sensor module (ACS712-30A) is connected in series with the motor.
![]() Security note: For security reasons, always remove mower blades in your first tests!
Security note: For security reasons, always remove mower blades in your first tests!

NOTE: only for demonstration! See real schematics for concrete wiring

Choosing a driver
When purchasing a motor driver, consider...
- max. thermal load (short-circuit current)
- price
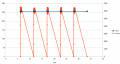
Starting current
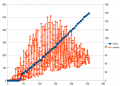
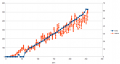
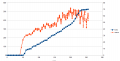
Here are some measurements of the Ardumower motor's starting current (peak):
Starting current:
- Gear motor: 15A (starting current peak)
- Mowing motor: 20A (starting current peak)

Gear motor start current (peak)

Short-circuit current
To not damage the motor driver on the first run, find out the maximum current that can flow through your motors. In other words, find out the 'short-circuit' current. Typical measurement installation:
Battery === Ampere meter === Motor
The Amperemeter (e.g. model making) should be able to measure the maximum current (e.g. 30A). The motor to be measured is mechanically blocked (so it cannot rotate).
Warning
- always remove blades
- only connect battery for a short period (1-5 seconds)
- always use cables with sufficient wire cross section
Example measurement:
- Rotenbach SPM08-320
- Wheel motor: 8A
- Mowing motor:
- Ambrogio L50
- Wheel motor: 4,5A
- Mowing motor: 22A
- Tianchen TC-G158
- Wheel motor: 5,4A
- Mowing motor: 16A (both 32A)
The measured current will only flow in 'worst-case' scenarios, which means when the motor starts or when it is blocked and it will only flow for a short time (as your battery might not deliver the high current constantly, and so current and voltage will break down).
Current sensor
To detect certain conditions (robot drives against obstacle, motor blocks etc.), the motor current should be monitored constantly. There are two approaches for sensing current.
Approach "Hall sensor module"
This is the recommended approach for sensing current. These current sensor modules are available for different current ranges.
- ACS712ELC-05A (185mV/A, max. 5A)
- ACS712ELC-20A (100mV/A, max. 20A)
- ACS712ELC-30A (66mV/A, max. 30A)
- The lower the range, the more precise the measurement.
Approach "Shunt resistor (circuit)"
The current flows across a very small resistor (0.5 Ohm) and the voltage drop is measured
