Realtime clock
Realtime clock (RTC)
The robot requires a clock, so that it can start mowing automatically at certain time intervals (timer).
A realtime clock (RTC) returns current time (minute, hour) and date (day of week, day, month, year) - by the help of a battery the time continues to run even if the robot mower is switched off.
Example: DS1307

ds1307

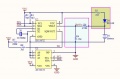
ds1307_schematics

Wiring
The RTC module is connected on the I2C bus of the Arduino Mega (in parallel with any other I2C modules).
DS1307 Module SDA — Arduino SDA Pin DS1307 Module SCL — Arduino SCL Pin DS1307 Module VCC (+5V) — Arduino VCC (+5V) DS1307 Module GND — Arduino GND
Note If you experience communication problems when using multiple I2C modules on one I2C bus, it is recommended to reduce the length of the cables.
Timer On the robot, several timers can be programmed (via Android pfodApp). For each timer, you can define a time interval and the desired days.
Example:
Timer 1: 08:00 - 13:00 Monday, Thuesday, Wednesday Timer 2: 14:00 - 16:00 every day Timer 3: off Timer 4: off