Motor-Treiber: Unterschied zwischen den Versionen
(→Radmotoren) |
(→MC33926 (empfohlen)) |
||
| Zeile 69: | Zeile 69: | ||
=== MC33926 (empfohlen) === | === MC33926 (empfohlen) === | ||
| − | Eigenschaften: bis zu 3A, mit integriertem Stromsensor und Thermoschutz, für alle Arten von Mähroboter | + | Eigenschaften: bis zu 3A, mit integriertem Stromsensor und Thermoschutz, für alle Arten von Mähroboter |
| + | |||
| + | Spannungsspitzen: Bei 24V Systemen kommt es zu Spannungsspitzen, die den Motortreiber schnell zerstören können. Daher wurde das Protektorboard entwickelt um dies zu verhindern. Wie das bei 12V-Systemen ist können wir nicht genau sagen da dies wiederum auch von den Motoren abhängig ist. Es werden 2 Stück benötigt. Einen für die Antriebsräder und einen für den Mähmotor. Schaden kann das Protektorboard auf keinen Fall. | ||
<gallery> | <gallery> | ||
Version vom 28. März 2016, 23:28 Uhr
Inhaltsverzeichnis
Zusammenfassung
Das Ardumower- Design verwendet zwei verschiedene Typen vo Motoren. Alle Motoren können im Shop shop ![]() ) erworben werden:
) erworben werden:
- Zwei Getriebemotoren als Antriebe (Radmotoren) mit Encoder(für Weg-, Richtungs- und Geschwindigkeitssteuerung)
- einen Motor (mit hoher Drehzahl) zum Mähen (Mähmotor)
Zur Steuerung der Motoren sind Motortreiber erforderlich.
Spannungen
Obwohl es 12V- und 24V- Motoren gibt, verwendet der Ardumower, wie alle modernen Systeme, 24V Motoren. Der Grund ist folgender:
Nehmen wir an, der Motor verbraucht 50W. Bei 24V ist der daraus resultierende Strom: 50W / 24V = 2A. Bei Verwendung von 12V resultiert daraus ein Strom von: 50W / 12V = 4A.
Je höher der Strom (A), um so mehr Probleme treten auf:
- Der Motortreiber muss für höhere Ströme ausgelegt werden (teurer)
- die Leiterzüge auf der Platine müssen breiter sein (teurer)
- der Akku muss in der Lage sein, höhere Ströme zu liefern (teurer)
Aus diesen Gründen ist der Ardumower als ein 24V-System ausgelegt.
Radmotoren

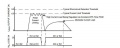
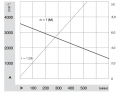
Ardumower Getriebemotor(Welle: 8mm Durchmesser, 5900 U/min, 0.055 Nm, Übersetzung: 1:212, Ausgangs-Drehmoment 2.45Nm, Ausgangsdrehzahl 31 U/min)
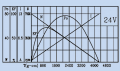
Ardumower Getriebemotor Kennlinie (nur Motor)

Reduzierung der Motorstörungen



Die beiden Getriebemotoren werden unabhängig voneinander gesteuert ('Differentialantrieb') :
- Fahren vorwärts/rückwärts
- Lenken links/rechts
Die Eigenschaften der Ardumower - Radmotoren:
- Eine Drehzahl bis zu 31 U/min erlaubt es, den Roboter mit einer ausreichenden Geschwindigkeit von bis zu (Meter/sec = 31rpm/60 * PI * 0.25m = 0.4m/sec) bei Verwendung von Rädern mit 250 mm Durchmesser, zu bewegen.
- ein hohes Drehmoment (2.45 Nm) garantiert, dass der Roboter kleinere Hügel bis zu 14 Grad erklimmen kann (mit 2 Motoren, 250 mm Rädern, 31 U/min = 0.4m/s, Beschleunigung = 0.2 ( 1/2 der Nominalgeschwindigkeit) see calculator
- Der eingebaute Encoder kann die Drehzahl messen, den Weg und die Richtung feststellen. (siehe | Odometrie für weitere Informationen) - für die Ardumower-Software sind Encoder erforderlich.
- 24V (Laststrom ca. 1A)
Motortreiber
Ein Motortreiber ist eine elektronische Schaltung, die es ermöglicht, Strom durch den Motor in eine Richtung oder in die entgegengesetzte Richtung fliessen zu lassen - abhängig davon,ob der Motor vorwärts oder rückwärts fahren soll. (eine sog. 'H-Brücke'). Es gibt viele Motortreiber als Fertigplatinen, einige können zwei Motoren steuern (Dual H-Brücke) - wenn man 2 dieser Brücken parallel schaltet, kann man den max. Motorstrom erhöhen.
Wenn die Drehrichtung des Motors nicht gesteuert werden muss, (z.B. für die Messer), braucht man keine H-Brücke, statt dessen kann ein einfacher 'Schalter' (d.h. ein MOSFET-Transistor) verwendet werden.
Der Motortreiber ist über Steuersignale mit dem Arduino verbundeno. Beispiel:
Arduino Digital Pin —> MOTOR-Direction Pin (DIR) Arduino PWM Pin —> MOTOR-Speed Pin (PWM) Arduino Analog Pin <— MOTOR-Current Sensor Pin
ein Pin steuert die Drehrichtung (vorwärts/rückwärts), der andere Pin steuert die Geschwindigkeit. Ein analoger Eingangspin ist mit dem Stromsensor verbunden. Die Stromsensor-Module (ACS712-05A) sind in Reihe mit dem Motor geschaltet.
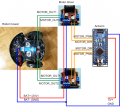
Bemerkung: nur zur Demonstration! Die konkrete Schaltung siehe hier: schematics

PWM Frequenz
Die Geschwindigkeit der Motoren wird durch das Tastverhältnis eines pulsweiten-modulierten Signales gesteuert. Wir verwenden die Arduino Standart PWM Frequenz (490 Hz) zur Steuerung der Motortreiber.

Arduino PWM Tastverhältnis
PWM 490 Hz: Odometrie ticks, sense (Strom)
PWM 3.9 Khz: Odometrie ticks, sense (Strom)

PWM 20 Khz: Odometrie ticks, sense (Strom)
PWM 31 Khz: Odometrie ticks, sense (Strom)





verbreitete Module
MC33926 (empfohlen)
Eigenschaften: bis zu 3A, mit integriertem Stromsensor und Thermoschutz, für alle Arten von Mähroboter
Spannungsspitzen: Bei 24V Systemen kommt es zu Spannungsspitzen, die den Motortreiber schnell zerstören können. Daher wurde das Protektorboard entwickelt um dies zu verhindern. Wie das bei 12V-Systemen ist können wir nicht genau sagen da dies wiederum auch von den Motoren abhängig ist. Es werden 2 Stück benötigt. Einen für die Antriebsräder und einen für den Mähmotor. Schaden kann das Protektorboard auf keinen Fall.

Pin-Belegung

Jumper

Schaltung
automatischer Strombegrenzer

Motorstart 50% PWM Tastverhältnis
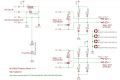
Impuls/EMF Schutz





M1_FB --- pinMotorLeftSense A1 M1_SF --- pinMotorLeftFault 25 M1_PWM_D1 --- verbunden mit Jumper nach GND M1_PWM_D2 --- verbunden mit Jumper nach VDD M1_IN1 --- pinMotorLeftPWM 5 M1_IN2 --- pinMotorLeftDir 31 EN --- pinMotorEnable 37 M2_FB --- pinMotorRightSense A0 M2_SF --- pinMotorRightFault 27 M2_PWM_D1 --- verbunden mit Jumper nach GND M2_PWM_D2 --- verbunden mit Jumper nach VDD M2_IN1 --- pinMotorRightPWM 3 M2_IN2 --- pinMotorRightDir 33 EN --- pinMotorEnable 37 VDD --- Arduino 5V
L6201P

L6201P Platine

L6201P Datenblatt


Eigenschaften: 48V, 4A
B+ Ausgangsspannung der Srtomversorgung GND GND EN driver enable RPWM forward PWM signal, active HIGH LPWM reverse PWM signal, active HIGH CT current signal output VT voltage signal output
Forward EN=1, RPWM=PWM, LPWM=0 Reverse EN=1, RPWM=0, LPWM=PWM (auch möglich? EN=1, RPWM=255-PWM, LPWM=1 => muss noch getestet werden!) Brake EN=1, RPWM=0, LPWM=0 Not brake EN=0, RPWM=x, LPWM=x Bemerkung: 1=High level (3.3-5v), 0=Low level (0V oder GND)
L9958
Eigenschaften: Arduino 240W H-bridge Motortreiber-Board - SX8847, bis zu 8A
Beachte,dass diese Platine einen linearen Spannungsregler linear voltage regulator enthält,der Eingangsspannung (typisch 24 oder 12V)in 5V umwandelt. Einige module verwenden einen einzelnen Spannungsregler (chip VR1 auf dem Modul), oder zweistufig (VR1 und U2).
Die Konvertierung von 24V nach 5V mit einem linearen Spannungsregler ist sehr ineffizient (Eingangsstrom = Ausgangsstrom, wenn man z.B. 100mA bei 5V benötigt, braucht man auch 100mA bei 24V, so verliert man 1,9W in diesem Modul). Deshalb ist es empfehlenswert,den linearen Spannungsregler nicht zu benutzen und statt dessen die 5V aus einen Schaltregler zu beziehen.
L9958 GND---GND L9958 VCC---Arduino 5V L9958 EN---Arduino 5V L9958 DI---GND L9958 DIR---Arduino MOTOR_DIR L9958 PWM---Arduino MOTOR_PWM L9958 MOTOR(+)---motor(+) L9958 MOTOR(-)---motor(-) L9958 POWER(+)---battery(+) L9958 POWER(-)---battery(-)

L298N
Eigenschaften: bis zu 4A Bemerkung: bei der Verwendung des L298N-Motortreibers sollten beide H-Brücken (2A) parallel geschaltet werden, so dass beide H-Brückeneinen Motor treiben (max. 4A):
Parralelschaltung:
IN1 mit IN4 IN2 mit IN3 OUT1 mit OUT4 OUT2 mit OUT3
ENA und ENB sind mit einem Jumper versehen .

Treiberboard

Parallelschaltung für doppeltem Strom
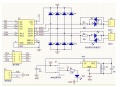
Schaltung



Mähmotor und Treiber

Ardumower Mähmotor
Ardumower Mähmotor -Kennlinie
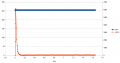
Anlaufstrom
Mähmotor blockiert, 500ms detection (max), waittime: 5sec (min)




Eigenschaften des Ardumower-Mähmotors:
- schnell genug um den Rasen zu schneiden (3150 U/min)
- genügend Drehmoment (140 mNm / 46 W)
- leises Mähen (man hört ihn kaum)
- 24V, Laststrom ~1.0A (L=2.8mH, R=1.9ohm)
Für den Mähmotor wird ein MOSFET-Schalter verwendet. Der MOSFET-Transistor IRLIZ44N (alternativ: IRF1404, IRL540N, RFP30N06LE, FQP30N06L) kann einen Strom von 30A mit einem 5V Steuersignal vom Arduino schalten (N-LogL). Der 10k Widerstand zieht den Eingang beim Start des Arduino auf Masse (GND). Der 180 Ohm Widerstand begrenzt den Strom am Gate bei Pegeländerungen auf ca. 30mA. Die Diode (MBR1045) schützt die Schaltung vor hohen Induktionsspannungen des Motors. Ein Stromsensor-Modul (ACS712-30A) ist in Reihe mit dem Motor geschaltet.
Bei Verwendung der Ardumower-Platine 1.2 wird ein MC33926 Motortreiber in Parallelschaltung zur Ansteuerung des Mähmotors verwendet.
![]() Sicherheitshinweis: Entferne zur Sicherheit stets die Messer bei diesen ersten Tests!
Sicherheitshinweis: Entferne zur Sicherheit stets die Messer bei diesen ersten Tests!

Bemerkung: nur zur Demonstration! Das konkrete Schaltbild sieht man hier schematics

Auswahl eines Treibers
Bei der Auswahl eines Motortreibers ist folgendes zu beachten:
- max. thermische Belastung (Kurzschluss-Strom)
- Preis
Anlaufstrom
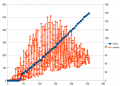
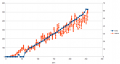
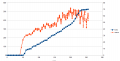
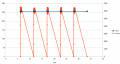
Hier sind einige Messungen des Anlaufstroms der Ardumower-motoren (Spitze):
Anlaufstrom:
- Getriebemotor: 15A (Anlaufstrom Spitze)
- Mähmotor: 20A (Anlaufstrom Spitze)

Getriebemotor Anlaufstrom (Spitze)

Kurzschluss-Strom
Um den Motortreiber nicht beim Lauf zu zerstören, ermittle den Strom, der maximal durch deinen Motor fließt. Mit anderen Worten, ermittle den Kurzschluss-Strom. Typische Messanordnung:
Akku === Amperemeter === Motor
Das Amperemeter sollte in der Lage sein, den max. Strom zu messen (d.h. 30A). Der Motor ist bei der Messung mechanisch zu blockieren (er darf nicht drehen).
Warnung
- immer Messer entfernen
- schliesse den Akku nur für einen kurzen Moment an (1-5 Sekunden)
- benutze nur Kabel mit ausreichendem Querschnitt
Beispiel-Messungen:
- Rotenbach SPM08-320
- Radmotor: 8A
- Mähmotor:
- Ambrogio L50
- Radmotor: 4,5A
- Mähmotor: 22A
- Tianchen TC-G158
- Radmotor: 5,4A
- Mähmotor: 16A (beide 32A)
Der gemessene Strom fließt nur im schlimmsten Fall, das bedeutet, wenn der Motor startet oder wenn er blockiert ist und das auch nur für eine kurze Zeit (der Akku kann den hohen Strom nicht über längere Zeit liefern, Spannung und Strom brechen zusammen).
Stromsensor
Zum Erkennen bestimmter Bedingungen (Roboter fährt gegen ein Hindernis, motor blockiert usw.), ist es notwendig, den Motorstrom ständig zu überwachen. Es gibt zwei Methoden zur Strommessung:
Mittels "Hall Sensor Modulen"
Das ist die empfohlene Methode zur Strommessung. Es gibt diese Module für verschiedene Strombereiche.
- ACS712ELC-05A (185mV/A, max. 5A)
- ACS712ELC-20A (100mV/A, max. 20A)
- ACS712ELC-30A (66mV/A, max. 30A)
- Je niedriger der Bereich, um so präziser ist das Messergebnis.
Mittels "Shunt-Widerstand (Schaltung)"
Der Strom fließt durch einen sehr kleinen Widerstand (0.5 Ohm oder weniger) und die daran abfallende Spannung wird gemessen.
