Ardumower Mini: Unterschied zwischen den Versionen
(→Needed parts) |
|||
| Zeile 7: | Zeile 7: | ||
=Needed parts= | =Needed parts= | ||
*[https://www.marotronics.de/index.php?a=152 Ardumower mini chassis including motors etc.] | *[https://www.marotronics.de/index.php?a=152 Ardumower mini chassis including motors etc.] | ||
| − | *PCB 1.3 | + | *PCB 1.3 (recommended) OR manual wiring using components (not recommended) |
=Pictures= | =Pictures= | ||
Version vom 5. Juli 2017, 13:54 Uhr

Inhaltsverzeichnis
Abstract
This page describes the 'Ardumower Mini' that can be used to implement a full Ardumower for indoor software development and
that you can purchase via the shop ![]()
Needed parts
- Ardumower mini chassis including motors etc.
- PCB 1.3 (recommended) OR manual wiring using components (not recommended)
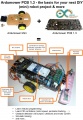
Pictures

Ardumower Mini and PCB 1.3
Ardumwower Mini poster

Videos
- Ardumower Mini and PCB 1.3
- Ardumower Mini
- Ardumower mini tracking perimeter wire
- Project LF: lane-by-lane mowing (Gyro+odometry)
- Project LF : robot position tracking on map
- Project LF: particle filter while mowing
- Project LF: robot position estimation via particle filter
- Project LF, milestone1 (working µC, perimeter, coil, motors, buzzer, LCD)
Steps
The Ardumower Mini can run the same software as the 'big Ardumower'. For the PCB, it's recommended to use PCB 1.3.
NOTE: Do not use more than 7 volt to operate the mini DC motors!
For further building instructions, see PCB1.3 and for uploading the software, see Azurit Firmware.
If you do not want to use PCB 1.3, you can (with some limitation) connect the components directly to the Arduino Mega as shown below. The limitations are: there will be no battery charging circuit, no charging station, and of course your wiring will not look as nice as a ready PCB :-) In Azruit Firmware (mower.h), choose PCB_1_2 and DRIVER_L298N.
 Important: Connect motor driver GND to Arduino GND, so both share a common GND!
Important: Connect motor driver GND to Arduino GND, so both share a common GND!
1. Start button
Button (a) --- Arduino pinButton (for actual pin number, see code: mini.cpp) Button (b) --- Arduino GND
2. Piezo buzzer
Buzzer (a) --- Arduino pinBuzzer (for actual pin number, see code: mini.cpp) Buzzer (b) --- Arduino GND
3. Motor driver
3.1 For L298N motor driver
+5v --- leave open +12v --- LiPo 2s battery 7volt (+) GND --- LiPo 2s battery 7volt (-), also connect to Arduino GND OUT1 --- left motor (+) OUT2 --- left motor (-) OUT3 --- right motor (+) OUT4 --- right motor (-) ENA --- insert jumper (enables OUT1,2) IN1 --- Arduino pinMotorLeftPWM (for actual pin number, see code: mini.cpp) IN2 --- Arduino pinMotorLeftDir (for actual pin number, see code: mini.cpp) IN3 --- Arduino pinMotorRightPWM (for actual pin number, see code: mini.cpp) IN4 --- Arduino pinMotorRightDir (for actual pin number, see code: mini.cpp) ENB --- insert jumper (enables OUT3,4) S1 --- insert jumper (enables 5v regulator for +12v voltage input)
NOTE: You can test L298N motor driver without Arduino:
- If you connect IN2 to HIGH (5v) and IN1 to LOW (GND), the motor should rotate forward.
- If you connect IN2 to LOW (GND) and IN1 to HIGH (5v), the motor should rotate reverse.
3.2 For MC33926 motor driver
VIN --- LiPo 2s battery 7volt (+) GND --- LiPo 2s battery 7volt (-), also connect to Arduino GND M1OUT1 --- left motor (+) M1OUT2 --- left motor (-) M2OUT1 --- right motor (+) M2OUT2 --- right motor (-) M1_FB --- Arduino pinMotorLeftSense (see code: mini.cpp) M1_SF --- Arduino pinMotorLeftFault (see code: mini.cpp) M1_PWM_D1 --- connect with jumper to GND M1_PWM_D2 --- connect with jumper to VDD M1_IN1 --- Arduino pinMotorLeftPWM (see code: mini.cpp) M1_IN2 --- Arduino pinMotorLeftDir (see code: mini.cpp) EN --- Arduino pinMotorEnable (see code: mini.cpp) M2_FB --- Arduino pinMotorRightSense (see code: mini.cpp) M2_SF --- Arduino pinMotorRightFault (see code: mini.cpp) M2_PWM_D1 --- connect with jumper to GND M2_PWM_D2 --- connect with jumper to VDD M2_IN1 --- Arduino pinMotorRightPWM (see code: mini.cpp) M2_IN2 --- Arduino pinMotorRightDir (see code: mini.cpp) EN --- Arduino pinMotorEnable (see code: mini.cpp) VDD --- Arduino 5V
NOTE: You can test MC33926 motor driver without Arduino:
- If you connect IN1 to HIGH (5v) and IN2 to LOW (GND), the motor should rotate forward.
- If you connect IN1 to LOW (GND) and IN2 to HIGH (5v), the motor should rotate reverse.
4. Arduino Mega
Power jack --- LiPo 2s battery 7volt (outside is-/inside is+)
5. Bluetooth receiver (optional, but recommended)
VCC5.0 --- Arduino 5v (for 5v Bluetooth version) VCC3.3 --- Arduino 3.3v (for 3.3v Bluetooth version) TXD --- Arduino RX2 RXD --- Arduino TX2 GND --- Arduino GND
6. Sonar/ultrasonic (optional, but recommended)
VCC --- Arduino 5v Trig --- Arduino pinSonarCenterTrigger (see code: mini.cpp) Echo --- Arduino pinSonarCenterEcho (see code: mini.cpp) GND --- Arduino GND
7. Model R/C (optional)
VCC --- Arduino 5v CHANNEL steer --- Arduino pinRemoteSteer (see code: mini.cpp) CHANNEL speed --- Arduino pinRemoteSpeed (see code: mini.cpp)
8. IMU (compass/gyro/accel) (optional)
SDA --- Arduino SDA SCL --- Arduino SCL GND --- Arduino GND VCC5.0 --- Arduino 5v
9. Perimeter receiver (optional, but recommended)
VCC --- Arduino 5v IN --- coil (a) GND --- coil (b) GND --- Arduino GND Out --- Arduino pinPerimeterLeft (see code: mini.cpp)
10. Perimeter sender (optional, but recommended)
See Ardumower sender.
11. Odometry/wheel encoder (optional)
VCC --- Arduino 5v GND --- Arduino GND DO1 (left motor) --- Arduino pinOdometryLeft (see code: mini.cpp) DO2 (right motor) --- Arduino pinOdometryRight (see code: mini.cpp) NOTE: Set 'twoWayOdometrySensorUse = 1'
12. Stand-alone perimeter receiver and sender (for your own robot project)
