Azurit Firmware (English): Unterschied zwischen den Versionen
(→Diagnostics/troubleshooting) |
(→Diagnostics/troubleshooting) |
||
| Zeile 330: | Zeile 330: | ||
Important: If you uploaded a new version into your robot, reset all settings via pfodApp once (Settings->Factory reset). This will delete all existing settings. Old settings can produce malfunction if the internal settings format has changed. | Important: If you uploaded a new version into your robot, reset all settings via pfodApp once (Settings->Factory reset). This will delete all existing settings. Old settings can produce malfunction if the internal settings format has changed. | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
= Motor controller (PID) = | = Motor controller (PID) = | ||
Version vom 8. Juli 2017, 12:52 Uhr
This page describes how to flash the Arduino for your robot mower, configure the robot mower and look for errors.
Inhaltsverzeichnis
- 1 Test requirements
- 2 Uploading the Arduino code to your Arduino
- 3 Serial console
- 4 Motor test
- 5 Odometry
- 6 First run
- 7 Sensor counters and sensor values
- 8 Console commands
- 9 Bluetooth module
- 10 Settings
- 11 Motor controller (PID)
- 12 Charging
- 13 IMU
- 14 IMU calibration steps
- 15 Perimeter receiver
- 16 GPS
- 17 Timer
- 18 Drop sensor
- 19 Finite state machine
- 20 How to report a new bug/new feature/new code
Test requirements
![]() Security note: For security reasons, always remove mower blades in your first tests!
Security note: For security reasons, always remove mower blades in your first tests!
![]() Important: For your first wheel motor tests, jack your robot so that the tires can run freely without ground contact!
Important: For your first wheel motor tests, jack your robot so that the tires can run freely without ground contact!
Uploading the Arduino code to your Arduino
NOTE: If you have never worked with Arduino before, read our 'Arduino first steps' introduction (it also contains useful information if uploading does not work).
1. Download an Ardumower Release at Github
2. Download the Arduino IDE that we will use to upload the code to your Arduino
3. Start Arduino IDE, and choose the right Arduino board (either Mega 2560 or Due)
4. In file 'mower.h', choose the correct PCB (PCB_1_2 or PCB_1_3) - Example for choosing PCB 1.3 (a line started with // will be ignored):
// #define PCB_1_2 #define PCB_1_3
5. In file 'mower.h', choose the correct robot type (ROBOT_ARDUMOWER or ROBOT_MINI)
6. In file 'mower.h', choose the correct motor drivers (DRIVER_MC33926 or DRIVER_L298N) - in most cases, DRIVER_MC33926 is the correct one
7. Upload the code to your Arduino board
Serial console
After successfully uploading, open the Arduino IDE serial console and choose baud rate 19200. You should see something like this:
ADCMan: found calib data ---ADC calib--- ADC sampleRate=38462 AD0 min=9999 max=-9999 diff=-19998 ofs=334 AD1 min=9999 max=-9999 diff=-19998 ofs=417 ... SETUP matchSignal size=24 subSample=4 capture size=192 1 0 -1 0 1 -1 1 -1 0 1 -1 1 0 -1 0 1 -1 0 1 -1 0 1 0 -1 IMU error: no calib data -------- accOfs=0.00,0.00,0.00 accScale=2.00,2.00,2.00 comOfs=0.00,0.00,0.00 comScale=2.00,2.00,2.00 -------- initL3G4200D gyro read error gyro read error gyro read error loadSaveErrorCounters: read loadSaveErrorCounters addrstop=423 loadUserSettings EEPROM USERDATA: NO EEPROM USER DATA PLEASE CHECK AND SAVE YOUR SETTINGS loadSaveRobotStats: read loadSaveRobotStats addrstop=822 START Ardumower 1.0a8-Azurit-dev PCB 1.3 Arduino Mega IOREF=5.00 Robot: Mini press... d for menu v to change console output (sensor counters, values, perimeter etc.) sen_counters t 1 L 0 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 677.0 chg 677.0 0.0 imu 0 adc 0 Mini
Motor test
In this motor test we will make sure that the motors are controlled in the right direction.
![]() Important: For your first wheel motor tests, jack your robot so that the tires can run freely without ground contact!
Important: For your first wheel motor tests, jack your robot so that the tires can run freely without ground contact!
1. In Arduino IDE serial console, press 'd' and ENTER to get the main menu - you should see something like this:
MAIN MENU: 1=test motors 2=test odometry 3=communications menu 5=calibrate IMU acc next side 6=calibrate IMU com start/stop 7=delete IMU calib 8=ADC calib (perimeter sender, charger must be off) 9=save user settings c=test RTC l=load factory settings r=delete robot stats x=print settings e=delete all errors 0=exit
2. Press '1' and ENTER for motor test. Motors left and right should turn in the shown directions.
testing left motor (forward) half speed... t 741 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 742 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 743 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 744 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 745 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini testing left motor (reverse) full speed... t 747 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 748 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 749 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 751 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 752 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini testing right motor (forward) half speed... t 754 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 755 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 756 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 757 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 758 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini testing right motor (reverse) full speed... t 760 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 761 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 762 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 763 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini t 764 L5790 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.1 0.9 imu 0 adc 0 Mini
If the wrong motor is turning, exchange left and right motor wires. If one motor is not turning in the right direction, exchange the motor wires (+/-).
Odometry
1. Make sure that you have connected all motor odometry cables to your PCB. Now we will test the encoders and connections. In the main menu (see above), choose '2' to test odometry. Both left and right odometry counters should start to increase about the same speed like shown below:
Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=0 right=0 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=1 right=1 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=2 right=1 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=3 right=2 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=4 right=3 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=6 right=4 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=7 right=5 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=8 right=6 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution, '0' exit left=9 right=7 ...
Slightly block one wheel with your hands to see if the correct odometry counter (left or right) is reducing speed. If the wrong side is reducing speed, exchange odometry cables.
2. Choose 'o' to test a full wheel revolution. The wheels should make one turn and stop about at the starting position like shown below (in this example I'm using an Ardumower Mini and PCB1.3):
Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=0 right=0 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=0 right=1 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=1 right=1 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=1 right=2 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=2 right=2 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=3 right=2 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=3 right=3 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=4 right=3 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=4 right=4 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=5 right=4 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=5 right=5 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=6 right=5 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=7 right=5 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=7 right=6 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=8 right=6 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=8 right=7 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=9 right=7 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=9 right=8 Press'f' forward, 'r' reverse, 'z' reset, 's' stop, 'o' one revolution left=10 right=8
3. Choose '0' and ENTER to get back to the main menu.
First run
After motor test and odometry test were successful, we can do a first test run.
![]() Important: For your first robot test, jack your robot so that the tires can run freely without ground contact!
Important: For your first robot test, jack your robot so that the tires can run freely without ground contact!
To start the mower, you need to add a button and a buzzer. There are several modes (you have to press and hold the button for x beeps long):
1 beeps : Normal mowing (using blade modulation if available) 2 beeps : Normal mowing (without blade modulation) 3 beeps : Drive by model remote control (RC) 4 beeps : Drive without mowing 5 beeps : Find perimeter and track it
Press the button for '1 beep', and the robot's wheels should start turning forward (switching from state OFF to state FORW) as shown below:
t 2 L5731 m0 OFF rpm 0 0 set 0 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.3 0.9 imu 0 adc 97 Mini t 0 L5942 m0 FORW rpm 0 0 set 50 50 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.3 0.9 imu 0 adc 0 Mini t 0 L5942 m0 FORW rpm 60 60 set 50 50 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.3 0.9 imu 0 adc 90 Mini t 1 L3764 m0 FORW rpm 60 60 set 50 50 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.3 0.9 imu 0 adc 97 Mini t 2 L4160 m0 FORW rpm 60 60 set 50 50 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 6.8 chg 0.3 0.9 imu 0 adc 97 Mini
If it does not stay in the 'FORW' state for at least one minute, probably a sensor will make a false trigger and you have to fine-tune the settings for that sensor.
Sensor counters and sensor values
There are different views for your sensors:
m0 - sensor trigger counters (default view) m1 - current sensor values m2 - perimeter values
You can change the view by pressing 'v' and ENTER. You will see the selected view in the console as shown below:
t 4 L177 m0 ...
There is a counter for each sensor. Once a sensor triggers, the corresponding counter increases. In the example below the mower motor current overflow triggered, and so the mower motor sensor counter increases. Additionally, the robot switches from state 'FORW' (forward) to the new state 'REV' (reverse):
t 4 L177 m0 FORW spd 33 33 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 20.8 chg 21.7 0.0 imu 0 adc 0 Ardumower t 5 L177 m0 REV spd -26 -26 0 sen 0 0 1 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 20.8 chg 21.7 0.0 imu 0 adc 1 Ardumower
Here is a description of each column:
t - time of current machine state (FORW, REV, ROLL, etc.) (ms) L - loop () - cycles per second m - console output mode (0 = sensor trigger counters / 1 = current sensor values / 2 = perimeter values) spd - current motor speed left and right wheels set - set point values for motor wheels speed control sen - motor current overflow counter: left wheel, right wheel, mower motor bum - bumper counter: left, right son - ultrasonic distance-below: counter pit, roll - inclination (calculated with IMU/accel sensor) yaw - compass course bat - battery voltage chg - charger voltage sensor
Console commands
You can manually trigger sensors via the console. Also, you can set the robot into a specific state.
'd': menu for testing, adjust IMU, Bluetooth 'v': monitorMode (show Value not Counter 'h': drive home 'p': track perimeter 'l': simulate left bumper 'r': simulate right bumper 's': simulate lawn sensor 'm': toggle mower motor 'c': simulate charging '+': rotate 90 degrees '-': rotate 90 degrees '3': activate model RC '0': OFF '1': Automode motorMowEnable
Bluetooth module

The Ardumower can be monitored and controlled via an Android device (phone/tablet). Before you can use the Android App, you have to configure the bluetooth module on the robot so it matches the baud rate in the robot code.
1. Plug-in the bluetooth module (HC-05) on the PCB at the position where the bluetooth module pinout matches the PCB pinout.
2. Press and hold the micro KEY button on the bluetooth module and power-on the robot. The bluetooth LED should blink slowly now.
3. Start the Arduino IDE serial console, choose 19200 baud and press 'd' and ENTER to enter the main menu.
4. Press '3' and ENTER to get into the communications menu - you should get something like this:
COMMUNICATIONS MENU == Bluetooth == 1=Select other communication method 2=setup BT module config (quick baudscan (recommended)) 3=setup BT module config (extensive baudscan) 0=Main Menu
5. Press '2' and ENTER to run the bluetooth module config - you should see several 'success' lines as shown below:
trying baudrate 38400 config 0... send: AT send: AT received: OK =>success
detecting BT type... send: AT+VERSION send: AT+VERSION? received: +VERSION:2.0-20100601 OK =>must be a HC03/04/05 ?
setting name Mini... send: AT+NAME=Mini received: OK =>success
setting pin 1234... send: AT+PSWD=1234 received: OK =>success
setting baudrate 19200... send: AT+UART=19200,0,0 received: OK =>success You may restart BT module now!
6. After the module has been properly configured, download the App 'ArduRemote' on your Android device. Alternatively, you can use the App 'pfodApp'.
7. You need to pair the bluetooth module it with your Android device. On the Android device, choose symbol "Settings" (via Android menu). Now choose "Wirless and Networks->Bluetooth Settings" and "Find device". Finally, choose "pair with this device" and enter your pin ("1234"). The Bluetooth module should now appear as "paired". Try to connect your Android with your robot. You should get a menu like this on your Android device:

PC/Mac remote control application
In addition to the Android App, we have developed a remote control application for PC/Mac/Linux (developed in Processing/Java). The Mac standalone version has to be created within Processing, the Windows version is already available as standalone version:
- Download Windows 64 bit executable and extract it:
https://drive.google.com/uc?export=download&confirm=EYiA&id=0B90Bcwohn5_HRFFMUUFYWF9OdW8
- Download and install Java runtime (version 8 or higher): https://java.com/de/download/
- Plug-in an USB bluetooth dongle on your PC
- In Windows, pair the USB bluetooth dongle with the Ardumower bluetooth module - two new serial ports will be created on your PC (the first for incoming bluetooth connections, the 2nd one for outgoing bluetoth connections)
- Run 'processing_remote.exe', all available serial ports will be shown - select the serial port for outgoing connections
The code for Processing can be found here: https://github.com/Ardumower/ardumower/tree/master/code/Test_und_Entwicklung/processing_remote
Processing can be downloaded here: https://processing.org/
Sensor logging
For PC data analysis, algorithm modelling and optimization, you can collect robot sensor data using pfodApp like this:
- Using your Android pfodApp, connect to your robot and choose 'Log sensors'. The logged sensor data will be displayed. Click 'Back' to stop logging (NOTE: for ArduRemote, press Android menu button before and choose 'Enable logging' to enable file logging).
- Connect your Android phone to the PC, if being asked on the phone choose 'Enable as USB device', so you phone shows as a new Windows drive on your PC.
- On your PC, launch Windows Explorer and choose the new Android drive, browse to the 'pfodAppRawData' folder (for ArduRemote: 'ArduRemote' folder), and copy the data file to your PC (you can identify files by their Bluetooth name and date).

1. Start pfodApp

2. Choose 'Log sensors'

3. Choose phone back button or 'Exit'

4. Connect to your PC via USB, choose 'Enable as USB device'

5. Using Windows explorer, browse to folder 'pfodAppRawData' on external Android drive to access sensor log file





Settings
The robot uses settings that you can adjust for your own robot and environment (via pfodApp or directly in the code). The default settings (factory settings) are stored in the config file 'mower.cpp'. In this file you can find a description of all settings.
The settings can be adjusted via Android phone (pfodApp).

Visualization of settings
Motor speed settings


Important: If you uploaded a new version into your robot, reset all settings via pfodApp once (Settings->Factory reset). This will delete all existing settings. Old settings can produce malfunction if the internal settings format has changed.
Motor controller (PID)
The speed of the motors is controlled by a software PID controller. You can monitor the quality of the motor speed control via pfodApp (Plot->Motor control):
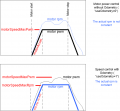
Motor speed settings


Charging
In the robot itself, the battery voltage is monitored (see diagram below). So it can be determined when the robot must go to the charging station. The robot and the voltage and the current during charging is controlled. So it can be determined whether the robot has reached the charger and when the battery is fully charged again.
Via pfodApp (Android) you can monitor the charging process.
Charging plot

Battery settings

Battery fully charged

Charging with timeout




IMU
An IMU (Intertia Measurement Unit) is a key component of an inertia navigation system. We use it to:
- detect if the robot is in tilt orientation
- keep the robot on track for the 'lane-by-lane' mowing pattern

Acceleration sensor
An acceleration sensor measures earth gravity force (m*s^2) in all 3 robot axes (x/y/z) allowing you to calculate the orientation towards earth center of the robot (Roll, Pitch). However, it cannot detect movement around Yaw - this requires a gyro.

Gyro
A gyro measures rotational speed (degree/second) in all 3 robot axes (Roll, Pitch, Yaw). This allows us to correct the robot if it is driving 'off-course' due to wet conditions or slope. When integrating (adding) gyro values over time, the actual course (yaw) can be calculated. However, because each sensor reading has a small error, the course will 'drift' over time. This needs to be corrected via an absolute heading sensor (compass).
Typical gyro measurement errors:
noise dps/sqrt(Hz) L3G4200D 0.03 ITG3200 0.03 L3GD20 0.03 BMG160/BNO055 0.014 MPU9250 0.01 L3GD20H 0.011 LSM9DS0 0.00875 BMI160 0.007 MAX21003 0.007 L2G2IS/L2G3IS 0.006 MPU9150/MPU6050 0.005 ADXRS290 0.004 CRM100/200 0.003 GYPRO2300 0.00277
Compass
If a robot drives on a wet lawn, you'll notice quickly that it will not drive straight forward, but instead tends to drive into the direction of the slope. Reading a compass heading can solve this problem and the robot will drive straight forward again .
However, a compass has two problems:
- If tilting the robot, the compass measurements (x,y,z) relate to the tilted robot. So, you need to correct them using knowing the tilt angles. This requires the use of the accerlation sensor (x,y).
- The compass measurements are influenced by motors. So you may need to switch of the motor to get an accurate measurement.
Typical compass measurement errors:
sensitivity (uT) typical heading error (degree) AK8975 (MPU9150) 0.3 5 BNO055 0.3 2.5 CMPS11 (9S0 2413 530BS) 2.0 HMC5883L (GY-80) 0.2 1.5 AK8963 (MPU9250) 0.15 not tested LIS3MDL 0.14 not tested LSM303DLM MAG3110/FXOS8700CQ 0.1 not tested
IMU sensor fusion
To eliminate the issues of all sensor, they are merged to compute the course (degree) and pitch/roll angles.
We use a complementary filter to fusion all sensor values.

IMU module

GY-80 module
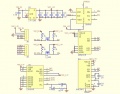
GY-80 schematics


GY-80
- Acceleration sensor: ADXL345B
- Compass sensor: HMC5883L
- Gyro: L3G4200D
- Pressure sensor: BMP085 (not used here)
Assembly
This photo shows how the IMU module is placed in the driving position (the red arrow shows the driving position). Ensure a minimum distance of 30cm from all motors. This minimum distance seems to be needed to ensure the compass is not disturbed by dynamically disturbing sources (like motors).

IMU calibration steps
Acceleration sensor
This calibration can be performed outside of the robot. Place each of the 6 module sides exactly upright, do not move and choose 'next side calibration':
- Via serial console "IMU acc calibration next side" OR
- Via pfodApp "Settings->IMU->acc calibration next side"
Do not move the module during the measurement of each side! During measurement you will hear a short beep tone.
Repeat this step for all 6 sides. After all 6 sides are calibrated, you will hear a short melody.

Compass sensor
This calibration can only be performed inside of the robot (IMU in its final position). Start the compass calibration:
- Via serial console "IMU com calibration start/stop" OR
- Via pfodApp "Settings->IMU->com calibration start/stop"
Hold each of the 6 module sides to North direction and tilt the module until minimum and maximum of the axis does not change anymore (until no tone is outputted anymore):

Calibration quality test
For a quality test, you can plot the calibration results (Yaw, Pitch, Roll) via pfodApp. Place the robot on a flat ground and let it rotate (pfodApp: click on "Commands->Auto rotate" until robot rotates). Alternatively, you can let the robot drive a circle (pfodApp: click "Manual->Right" until it drives the desired radius). Finally, choose 'Plot->IMU' to see the calibration result.
For the yaw plot, the curve should be a straight line when the robot is rotating with a constant speed.

Perimeter receiver
Perimeter settings
At first, activate the perimeter in the Ardumower software (pfodApp->Options->Perimeter Use: YES). It is recommended to keep the default perimeter settings.
The perimeter settings are:
- Timed-out if below smag (timedOutIfBelowSmag) - default setting: 300 | If smag below this value, sender is considered as off (perimeter timeout appears)
- Timeout (s) if not inside (timeOutSecIfNotInside) - default setting: 8
- Trigger timeout (perimeterTriggerTimeout) - default setting: 0 | Perimeter outside trigger timeout when escaping from inside (ms)
- Perimeter out roll time max (perimeterOutRollTimeMax) - default setting: 2000 | Max (random generator) roll time after perimeter out (ms)
- Perimeter out roll time min (perimeterOutRollTimeMin) - default setting: 750 | Min (random generator) roll time after perimeter out (ms)
- Perimeter out reverse time (perimeterOutRevTime) - default setting: 2200 | Time to drive reverse after perimeter out (ms)
- Perimeter tracking roll time (perimeterTrackRollTime) - default setting: 1500 | Hit obstacle while tracking: roll time
- Perimeter tracking reverse time (perimeterTrackRevTime) - default setting: 2200 | Hit obstacle while tracking: reverse time
- Transition timeout (trackingPerimeterTransitionTimeOut) - default setting: 2000 | Max. time required for a in/out transition during tracking, robot will start rotating after this timeout
- Track error timeout (trackingErrorTimeOut) - default setting: 10000 | Max. time required for a in/out transition during tracking, robot will go into error after this time
- Track_P (perimeterPID.Kp) - default setting:51 | Perimeter PID "P" setting
- Track_I (perimeterPID.Ki) - default setting:12.5 | Perimeter PID "I" setting
- Track_D (perimeterPID.Kd) - default setting:0.8 | Perimeter PID "D" setting
- Use differential signal (useDifferentialPerimeterSignal) - default setting: YES | Use differential signal (see signal section)
- Swap coil polarity (swapCoilPolarity) - default setting:NO
- Block inner wheel (trackingBlockInnerWheelWhilePerimeterStruggling) - default setting: YES | robot is wheel-spinning while tracking => roll to get ground again
Receiver ADC calibration
![]() The ADC calibration ensures that the zero point (silence) is detected correctly, and so later the received signal is symmetric around zero.
The ADC calibration ensures that the zero point (silence) is detected correctly, and so later the received signal is symmetric around zero.
- The perimeter sender and robot motors must be switched off during calibration!
- If you cannot avoid that another sender is disturbing during calibration, remove the coil during calibration (connect LM386 input line to GND)
- Run the ADC calibration once ("pfodApp->ADC Calibration")
When calibrated correctly, the signal in the pfodApp plot ('sig') should be around zero (0) when the perimeter sender is switched off. When the perimeter sender is switched on, the plotted signal ('sig') should have the same maximum amplitude for both positive and negative axis (is 'symmetric around zero').

symmetric signal when sender is on (after ADC calibration)
zero signal when sender is off (after ADC calibration)

Receiver diagnostics/troubleshooting
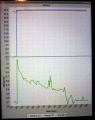
The receiver signal, filter result and signal quality can be monitored via Android phone (pfodApp->Plot->Perimeter):

Signal-to-noise ratio (SNR)

signal, filter result, LP filter result, inside/outside, counter, on/off, quality

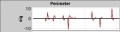
Moving from inside to outside









Plot signal description:
sig: coil signal (raw pulse sequence after ADC) - it's a short snapshot (32 samples), and it's taken every 20 seconds
(so you need to wait 20 seconds for the next snapshot)
mag: filter result: inside (negative) or outside (positive), magnitude: distance to perimeter wire/magnetic signal strength (RSSI)
- this is used for perimeter tracking
smag: filter result, low-pass filtered, without sign (smooth mag) - this is used for 'sender-off' detection
The threshold can bet set via pfodApp (Settings->Perimeter->Timed-out if below smag)
in: binary result, low-pass filtered: inside (1) oder outside (0) - this is used for perimeter boundary detection
If the robot is not inisde for a certain time, it will go into error. The threshold can bet set via pfodApp
(Settings->Perimeter->Timeout (s) if not inside)
cnt: number of "inside-outside" transitions (counter)
on: perimeter sender active, robot is inside and smag is high enough (1) or inactive/outside/smag too low (0)
qty: signal quality (how distinguisable inside and outside were in filter result
computes ratio: match score with template signal / match score with inverse template signal
1.0 means poor quality, you should get 1.5 or higher)
The 'mag' plot should be clear (without spikes): Inside the perimeter loop, the signal should be a clear negative curve, outside it should be a clear positive curve. If your 'mag' curve is not clear (and has spikes), try to troubleshoot/optimize:
- Verify, your coil is connected correctly at 'pinPerimeterLeft' (you still may get a poor signal when connected at a wrong Arduino pin!)
- Decrease the threshold for a smag timeout via 'pfodApp->Options->Perimeter->Timed-out if below smag'
- Reverse coil if the in/out is inverted or reverse the perimeter wire
- Minimize cable length between coil and LM386-pre-amplifier (directly mount coil onto pre-amplifier)
- Increase distance between coil and mower motor/DC converter (move away coil 30cm or more from any motors or DC converters)
- Add some magnetic shield (e.g. your battery) between coil and motors/DC converter
Tracking of perimeter
The tracking of the perimeter wire is performed using a (software) digital PID controller. The controller's parameters (P,I,D) can be configured via the phone (pfodApp).

You can find more information about PID controllers here: Forum.
GPS
With the help of a GPS receiver (e.g. GY-NEO6MV2, ublox 6m), the long-term position can be calculated. Therefore, the GPS position values will be averaged.
Currently, GPS is used
- to receive current date and time
Visualization of GPS data
GPS data (course, speed, position etc.) can be plotted by pfodApp. One neat thing I discovered is that you can get precise heading and speed even when moving short distances (< 2m). This works because the GPS receiver is evaluating the signal phase due to the doppler effect.
hdop measurement error indication (the more satellites are from different directions, the lower the error) sat number of satellites in view spd ground speed m/s course ground course degree alt altitude meter lat latitude lon longitude

GPS plot

GPS plot (heading/speed via doppler effect)

GPS 2d map (tracked perimeter)



GPS error
Typical GPS error is 2-5 meters (at a sample rate of 1 Hz). As this is not sufficient as a replacement for a perimeter wire, GPS can only be seen as an extension or for global navigation (navigation from one lawn to another lawn).
Timer
On the robot, several timers can be programmed (via Android pfodApp). For each timer, you can define a time interval ('time windows') for the desired days. As long as the actual time is within any time window, the robot can freely mow, charge, mow, charge etc.
Example:
Timer 1: 08:00 - 13:00 Monday, Thuesday, Wednesday
Timer 2: 14:00 - 16:00 every day
Timer 3: off
Timer 4: off
Drop sensor
Einstellung im Sketsch:
Die Absturzsensoren sind ab der Softwarefunktion 242 integriert.
(Eine Integration in die Handy App bzw. das persönliche Speicher der Einstellungen ist zur Zeit noch nicht Intrigiert.)
Der Anschluss des linken und rechten Absturzsensor sind an den Pin 45 und 23 vorgesehen.
Um die Funktion zu aktivieren sind folgende Einstellungen in der Mower.ccp vorzunehmen.
// ------ drop ----------------------------------- dropUse = 1; // has drops? -Dropsensor - Absturzsensor vorhanden 0-nein 1-Ja dropcontact = 1; //contact Kontaktausführung 0-Öffner 1-Schließer
Verdrahtung:
Die IR Sensoren sollten möglichst weit vorne vor den Rädern angebracht werden. Um evl Reichweiten Schwankungen zu vermeiden sollten sie vor fremd Licht geschützt werden. Die IR Sensoren sollten so eingestellt werden das diese im normalen Betrieb leuchten, und wenn man den Mover hochhebt ausgehen. Am besten gleich auf der Grasoberfläche testen oder dort zumindest gegebenenfalls nachjustieren. In der Seriellen Ausgabe kann man den richtigen Anschluss kontrollieren. Sollte der Mover im Normalbetrieb den Kontakt zur Oberfläche haben sollte der Dropsensor nicht ausgelöst sein bzw der Counter des Dropsensors sollte nicht hochgezählt werden. Fall das so nicht sein sollte, ist die Einstellung in der Mower.ccp Datei zu kontrollieren bzw. zu ändern.
Dropcontact = 1; ändern in 0
(Kann je nach verwendeten Sensoren anders sein) Danach den Mower anheben so das dieser den Kontakt zur Oberfläche verliert. Darauf hin sollte in der seriellen Konsole sichtbar sein das der Dropsensor ausgelöst hat bzw. der Counter hoch zählt. Darauf hin kann das ganze im automatischen Betrieb getestet werden.
Gegebenenfalls muss noch die Acceleration angepasst werden. Diese ist auch in der Mower.ccp Datei zu finden. Das ist die Beschleunigungszeit bzw. die Abbremszeit der Antriebsmotoren. Dieser Wert muss angepasst (erhöht) werden damit der Mower schnell genug an der Gefahrenstelle anhalten kann.
Finite state machine
This section describes some internals of the Ardumower software architecture. Kurz zum Ablauf der Software: In der Hauptschleife (loop) werden periodisch:
- Die Sensoren eingelesen (readSensors)
- Der Zustandsautomat durchlaufen und abhängig vom aktuellen Zustand die Sensorwerte überprüft (CheckXXXXX) und von den Sensorwerten in neue Zustände gewechselt (setNextState) - beim Wechsel werden ggf. neue Soll-Werte für die Motoren gesetzt (Beispiel: motorLeftSpeedRpmSet).
- Die Motoren mit den Soll-Werten angesteuert (motorControl)
Die möglichen Zustände und Ergebnisse für die Übergänge des Zustands-Automaten sind hier unten alle grafisch darsgstellt.
Wenn der Mower also im Zustand FORWARD ist, fährt er nach vorn. Man schaut also in der loop() nach was alles in diesem Zustand FORWARD gemacht wird (case FORWARD). Dort hätte man die Möglichkeit weitere Aktionen einzufügen.
Main component of the software is a so called 'finite state machine', that means there exists a set of states ("OFF", "FORWARD", "ROLL", etc.) that the robot can be in. Depending on events (sensor is triggering etc.), the robot will enter a new state.
State diagram (Note: The drawing has been created using draw.io)

Implemented updates:
- If obstacle during reverse => roll
- If obstacle during roll => forward
How to report a new bug/new feature/new code
Click on 'this link' and create a new issue - Please let us know:
Your platform version (Arduino Mega 2560, Arduino Due) Your Arduino IDE version (latest code requires 1.6.3) Your exact operating system (Windows 8, Linux etc.) Your Ardumower code version (for a list of releases see https://github.com/Ardumower/ardumower/releases) Any other information that may be useful...