Wegmessung (Odometrie)
Inhaltsverzeichnis
Zusammenfassung



Mittels Odometrie können sowohl Geschwindigkeit als auch kurzfristige Position des ArduMower ermittelt werden. Dies basiert auf der Zählung der Umdrehungen des linken und rechten Radantriebsmotors (Motor-Encoder erforderlich zur Nutzung der aktuellen Ardumower-Software).
Momentan wird die Odometrie folgendermaßen genutzt:
- Gewährleistung der gleichen Drehzahl bei rechtem und linken Antriebsrad des Ardumower beim Vorwärtsfahren.
Pinbelegung der Ardumower Motor-Encoder
Die Motoren aus dem Shop verfügen über 2-Kanal-Encoder. Diese liefern 5 Impulse per Motorumdrehung. Multipliziert man diese mit dem Übersetzungsverhältnis des Getriebes von 1:212, erhält man 1060 Encoderimpulse pro voller Radumdrehung.
Pinbelegung und Verdrahtung der Encoder-Anschlüsse:
grün ---- GND braun ---- VCC blau ---- Odometry1 (Kanal 1) lila ---- Odometry2 (Kanal 2)
WICHTIG: Auf den PCB V0.5/1.2 fehlen die Pull-up-Widerstände! Du mußt sie selbst ergänzen:
odometry1 --- 4.7k --- 5v odometry2 --- 4.7k --- 5v
Signalform der Odometrie-Encoder

Vorwärts: Pin 1 zeigt Übergang LOW->HIGH und Pin 2 = HIGH Rückwärts: Pin 1 zeigt Übergang LOW->HIGH und Pin 2 = LOW
Do-It-Yourself encoders

Ambrogio L50: An encoder wheel of a computer mouse is glued to a slice. The screw of the wheel shaft is unscrewed, and the slice is added. Embedded in two Plexiglas pieces is a photo diode and photo transistor of a light barrier (e.g. LTH 301)

Tianchen TC-G158 (right): A light barrier (e.g. LTH 301) is interrupted by a gear-weheel of the motor shaft. ).
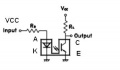
LTH301 circuit



Circuit
VCC pinArduino +--13 KOhm----+-------Collector Emitter---GND +--380 Ohm------------Anode Kathode---GND
Differential drive
By adding (integrating) Odometry speed, we can calculate distance and heading.

Differential drive

Distance per wheel:
left_cm = ticksLeft / odometryTicksPerCm right_cm = ticksRight / odometryTicksPerCm
Heading:
wheel_theta = (left_cm - right_cm) / odometryWheelBaseCm odometryTheta += wheel_theta
Overall distance:
avg_cm = (left_cm + right_cm) / 2.0 odometryX += avg_cm * sin(odometryTheta) odometryY += avg_cm * cos(odometryTheta)
Ground measurement error
By adding (integrating) Odometry speed, we can calculate distance and heading. However, as we are adding a small error each time (due to not exact physical ground measurement), distance and angle errors are increasing. This can be solved by sensor fusion.

Odometry error

Motor controller (PID)
The speed of the motors is controlled by a software PID controller. You can monitor the quality of the motor speed control via pfodApp (Plot->Motor control):

Video
No video yet (odometry is currently under development)