Wheel Motor: Unterschied zwischen den Versionen
(Die Seite wurde neu angelegt: „= Wheel motors caracteristics & driver = <gallery> File: ardumower_motor.jpg | Ardumower gear motor with encoder (8mm diameter, 5900 rpm motor, 0.055 Nm, gea…“) |
|||
| Zeile 36: | Zeile 36: | ||
File: Pwm_20khz.png | PWM 20 Khz: odometry ticks, sense (current) | File: Pwm_20khz.png | PWM 20 Khz: odometry ticks, sense (current) | ||
File: Pwm_31khz.png | PWM 31 Khz: odometry ticks, sense (current) | File: Pwm_31khz.png | PWM 31 Khz: odometry ticks, sense (current) | ||
| + | </gallery> | ||
| + | |||
| + | == Motor controller (PID) == | ||
| + | The speed of the motors is controlled by a software PID controller. You can monitor the quality of the motor speed control via pfodApp (Plot->Motor control): | ||
| + | |||
| + | <gallery> | ||
| + | File: Odometry_motor_pid_controller.png | ||
</gallery> | </gallery> | ||
Version vom 6. Dezember 2015, 00:10 Uhr
Inhaltsverzeichnis
Wheel motors caracteristics & driver

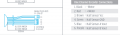
Ardumower gear motor with encoder (8mm diameter, 5900 rpm motor, 0.055 Nm, gear ratio 1/212, output torque 2.45Nm, output rpm 31)
Motor wiring
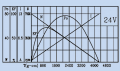
Ardumower gear motor curve (motor only)

Decrease motor noise



The two left and right gear motors are controlled independently (aka 'differential driving') to:
- drive the robot forward/backward
- steer the robot left/right
The Ardumower wheel motor features:
- A rotation speed up to 31 rpm allows to move the robot at sufficient speed (at up to meter/sec = 31rpm/60 * PI * 0.25m = 0.4m/sec using 250mm diameter wheels)
- A high torque (2.45Nm) guarantees that the robot can climb small hills as well (with 2 motors, 0.125 radius wheel, 31rpm = 0.4m/s, acceleration = 0.2 ( 1/2 of nomeinal speed) up to 14 degree) see calculator
- Integrated encoders, so it can measure the rotation speed, the distance and the direction (see Odometry for more information) - Encoders are REQUIRED for Ardumower software.
- 24V (load current ~1A)
Wiring
One pin controls the direction (forward/backward), the other pin controls the speed. One analog input pin is connected to the current sensor. The current sensor module (ACS712-05A) is connected in series with the motor.
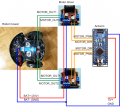
NOTE: only for demonstration! See real schematics for concrete wiring

Protection board is advice to be used between controler and motor.
Control principal : PWM frequency
The speed of the motor is controlled by a PWM duty signal. We use the Arduino default PWM frequency (490 Hz) to control the motor drivers.

Arduino PWM duty signal
PWM 490 Hz: odometry ticks, sense (current)
PWM 3.9 Khz: odometry ticks, sense (current)

PWM 20 Khz: odometry ticks, sense (current)
PWM 31 Khz: odometry ticks, sense (current)





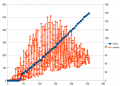
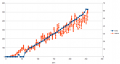
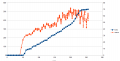
Motor controller (PID)
The speed of the motors is controlled by a software PID controller. You can monitor the quality of the motor speed control via pfodApp (Plot->Motor control):

Programming
/!\ work on going !