Azurit Firmware (Deutsch)
Inhaltsverzeichnis
- 1 Programm downloaden und Arduino programmieren
- 2 Einstellungen
- 3 Erste Inbetriebnahme
- 4 Starten des Mähroboters
- 5 Diagnose/Fehlerbehebung
- 6 Fehlerzähler / Fehlertöne
- 7 Fehlersuche
- 7.1 Hardwarefehler finden
- 7.2 Fehlercodes
- 7.3 I2C Fehler
- 7.4 Serieller Monitor auf Android-App ausgeben
- 7.5 Deaktiviere alle Pins, die nicht angeschlossen sind
- 7.6 Probebetrieb ohne Mähmotor-Treiber
- 7.7 Drehen die Motoren richtig?
- 7.8 Unerwartete Sensorauslösung
- 7.9 Einige Sensoren lösen nicht aus?
- 7.10 Keine Verbindung über Bluetooth
- 7.11 Roboter dreht sich im Kreis wenn er auf die Schleife trifft (Home Modus)
- 8 Konsolen-Ausgabe
- 9 Bluetooth
- 10 Wie melde ich einen Programmfehler/eine neue Eigenschaft/neuen Programmcode
- 11 Weitere Links
Programm downloaden und Arduino programmieren
NOTE: Wenn du noch nie mit Arduino gearbeitet hast, lies unser 'Arduino first steps' introduction.
Du hast zwei Möglichkeiten:
- Download github code (empfohlen) oder
- Download v0.9.3 code (alt, nicht empfohlen)
Zuletzt, downloade und starte Arduino IDE um das Programm auf dem Arduino zu speichern.
Arduino Version: Es ist wichtig, dass du die Version 1.6.3 oder höher der Arduino-Entwicklungssoftware benutzt und dass du das richtige Board auswählst (Mega 2560 or Due).
![]() Wichtig für Arduino IDE 1.6 oder höher: Falls sich Unterordner im Code-Ordner befinden (z.B. "unused"), diese bitte vor dem Kompilieren löschen!
Vergewissere dich, dass die Pin-Belegung im Arduino-Code (config.h/mower.cpp) mit deinem aktuellen Schaltplan übereinstimmt.
Wichtig für Arduino IDE 1.6 oder höher: Falls sich Unterordner im Code-Ordner befinden (z.B. "unused"), diese bitte vor dem Kompilieren löschen!
Vergewissere dich, dass die Pin-Belegung im Arduino-Code (config.h/mower.cpp) mit deinem aktuellen Schaltplan übereinstimmt.
Einstellungen
Der Roboter verwendet Grundeinstellungen die du für deinen Roboter und deine Umgebung anpassen kannst. Die Grundeinstellungen (factory settings) werden in der Konfigurationsdatei 'mower.cpp' gespeichert. In dieser Datei findest Du auch eine kurze Beschreibung aller Grundeinstellungen.
Diese Grundeinstellungen können später über ein Android-Handy verändert werden (pfodApp). Diese veränderten Einstellung haben dann höhere Priorität als die Grundeinstellungen. Alle geänderten Einstellungen können jederzeit auf Grundeinstellung (Werkseinstellung) zurückgesetzt werden.

Visualisierung der Einstellungen
Motor-Einstellungen


Wichtig: Wenn du eine neue Softwareversion auf deinen Arduino lädst, setze alle Einstellungen über die pfodApp auf die Grundeinstellungen zurück (Settings->Factory reset). Das löscht alle vorhandenen Einstellungen. Alte Einstellungen können zu Fehlfunktionen führen, wenn sich das interne Einstellungsformat geändert hat.
Erste Inbetriebnahme
1. Alle Sensoren deaktivieren. Zunächst alle Sensoren deaktivieren - In 'mower.cpp' den Roboter auf folgende Grund-Einstellungen setzen:
bumperUse = 0; dropUse = 0; rainUse = 0; sonarUse = 0; perimeterUse = 0; lawnSensorUse = 0; imuUse = 0; batMonitor = 0; odometryUse = 0; gpsUse = 0; buttonUse = 1; timerUse = 0;
2. Die Software bietet einen seriellen Konsole-Modus. Öffne die serielle Konsole in der Arduino IDE (Strg+Shift+M) und setze die BAUD-Rate auf 19200. Die Motor- und Sensorwerte sollten daraufhin ständig angezeigt werden. Erstmal löschen wir evtl. vorhandene Fehler:
Konsole: press... d for menu e=delete all errors
3. Dann die ADC-Kalibrierung vornehmen, damit alle ADC-Signale einen Nullpunkt erhalten.
press... d for menu 8=ADC calib (perimeter sender, charger must be off
4. Motor-Ansteuerung testen:
Konsole: press... d for menu 1=test motorsSicherheitshinweis: Aus Sicherheitsgründen sind die Mähmesser bei den ersten Tests nicht zu montieren!
Du solltest überprüfen ob die Antriebsmotoren richtig gesteuert werden und sich in die richtige Richtung drehen. Erhöhe 'motorAccel' in 'mega.cpp' falls die Motoren nicht schnell genug beschleunigen.
Starten des Mähroboters
Um den Mähroboter zu starten wird ein Taster und ein Piezo-Summer benötigt:
pinButton —o Taster o— GND (button for ON/OFF)
pinBuzzer —o Buzzer o— GND (Piezo buzzer)
Drücke nun den Taster, bis Du die Anzahl Pieptöne hörst, die dem Modus entspricht, den Du einstellen möchtest:
Modus (Drücke Taster bis du x Töne hörst):
1 Piep : Normales mähen (verwendet, wenn verfügbar, Messermodulation) 2 Pieps : Normales mähen (ohne Messermodulation) 3 Pieps : Fahren mit Fernsteuerung (RC) 4 Pieps : Fahren ohne mähen 5 Pieps : Finde Perimeterschleife und folge ihr
Diagnose/Fehlerbehebung
Jedesmal, wenn ein Sensor anspricht, zählt ein korrespondierender Sensorzähler um 1 hoch. Die Zählerstände der Sensorzähler sowie die aktuellen Sensorwerte kann man in der seriellen Konsole oder mittels der App ansehen. Die folgenden Werte werden in der seriellen Konsole angezeigt:
- Zeit des state machine's Status (ms)
- Schleifendurchläufe pro sec
- gewählter Anzeige-Modus (0=Zählerstände/1=aktuelle Werte/2=aktuelle Werte)
- aktueller state machine Status (FORW, REV, ROLL usw.)
- Fährt in Ladestation? (1/0)
- "spd" - Ansteuerung/Drehzahl der Motoren: links (PWM), rechts (PWM), Mähmotor (RPM)
- "sen" - Überstromzähler der Motoren: links, rechts, Mähmotor
- "bum" - Bumper Zähler: links, rechts
- "son" - Ultraschall Abstandsschwelle unterschritten (Zähler)
- "pit/roll" - Neigung (berechnet von Beschleunigungssensor)
- "com" - Kompass Kurs
- "per" - Perimeterschleife erkannt: Zähler
- "bat" - Akku Spannung
- "chg" - Ladestrom
Mittels der Taste 'v' kann zwischen Sensor-Zählerständen und den aktuellen Sensorwerten umgeschaltet werden.
![]() Zusätzlich kannst du mit Hilfe der Android-App 'pfodApp' die Sensorenausgaben über die Zeit grafisch darstellen (Zählerstände und aktuelle Werte). Das ermöglicht die drahtlose Überwachung deines Mähroboters zur Fehlersuche. Es ist sehr zu empfehlen.
Zusätzlich kannst du mit Hilfe der Android-App 'pfodApp' die Sensorenausgaben über die Zeit grafisch darstellen (Zählerstände und aktuelle Werte). Das ermöglicht die drahtlose Überwachung deines Mähroboters zur Fehlersuche. Es ist sehr zu empfehlen.

Sensor-Zählerstände

gemessene Sensorwerte

Ardumower Zustände



Fehlercodes und deren Behebung
http://wiki.ardumower.de/index.php?title=Fehlerbehebung
Fehlerzähler / Fehlertöne
Gibt es ein Kommunikationsproblem oder ein anderes ernstes Problem, zählt der entsprechende Fehlerzähler hoch. der Fehlerzähler kann über die pfodApp eingesehen. Zusätzlich Piept der Roboter beim starten.
Siehe Abschnitt Troubleshooting für Details zu allen Fehlern.
I2C Bus / Fehlertöne
Verschiedene Komponenten (Arduino Nano, RTC, IMU, usw.) kommunizieren über den I2C Bus (SDA/SCL Leitung). diese Leitungen sollten sehr kurz sein (evt. verdrillt) und sie sollten weit weg von DC/DC Wandlern und Motortreibern sein. Wenn es ein Kommunikationsproblem gibt, wird der Fehlerzähler erhöht und der Roboter piepst beim Starten. Der Fehlerzähler kann über die pfodApp eingesehen werden.
Fehlersuche
Hardwarefehler finden
Um Fehler beim Zusammenbau oder den elektronischen Bauteilen zu finden wird empfehlen ein Oszilloskop zu verwenden (z.B. Pocket-Oszilloskop DSO201). Ein Oszilloskop ermöglicht das Messen von kurzzeitigen Einbrüchen bei der Versorgungsspannung, des Senders und Empfängers der Induktionsschleife, Odometrie-Signale und mehr.

Anleitung für ein Pocket-Oszilloskop: http://www.ardumower.de/index.php/de/forum/anleitungen-hilfe/142-bedienung-oszilloskop-dso201
Fehlercodes
Wenn dein Ardumower periodisch piepst (4 Töne - Pause), ist er in einem Fehler-Status. Um den genauen Fehler zu finden, kann man die serielle Konsole oder die APP ('pfodApp->Error Counters') benutzen. Mögliche Lösungsvorschläge für jeden Fehler werden nachfolgend gegeben. Detaillierte Angaben zu deinen Robotereinstellungen, siehe Einstellungen.
ERR_CPU_SPEED Fehler CPU Geschwindigkeit
* I2C-Kabel überprüfen (z.B. Kabellängen kürzen)
ERR_MOTOR_LEFT Fehler linker Getriebemotor
* Überprüfe Motortreiber und linken Getriebemotor
* MC33926: stelle sicher, dass der SLEW Jumper nicht gesteckt ist
* beim Fahren: veringere 'Motor-Max-PWM' und 'Tracking-P' um EMF zu veringern
ERR_MOTOR_RIGHT Fehler rechter GetriebemotorRight gear motor error
* Überprüfe Motortreiber und rechten Getriebemotor
* MC33926: stelle sicher, dass der SLEW Jumper nicht gesteckt ist
* beim Fahren: veringere 'Motor-Max-PWM' und 'Tracking-P' um EMF zu veringern
ERR_MOTOR_MOW Mähmotor Fehler
* Überprüfe Motortreiber und Mähmotor
* MC33926: stelle sicher, dass der SLEW Jumper nicht gesteckt ist
* Veringere Motor-Max-Power, damit Überstrom früher erkannt wird
ERR_MOW_SENSE Mähmotor Überstrom
* Überprüfe Mähmotor-Treiber und Mähmotor
* Vergrößere Motor-Max-Power, damit Überstrom später erkannt wird
ERR_IMU_COMM IMU Kommunikationsfehler
* Überprüfe die Verbindung zum IMU-Modul
ERR_IMU_CALIB IMU Abgleich-Fehler
* Start 'IMU Abgleich' (entweder über die Konsole oder über pfodApp->Settings->IMU)
ERR_IMU_TILT IMU Neigungsfehler
* Überprüfe IMU-Modul und Ausrichtung des Roboters
ERR_RTC_COMM RTC Kommunikationsfehler
* Überprüfe die Verbindung zum RTC-Modul, RTC-Batterie usw.
ERR_RTC_DATA RTC-Daten sind fehlerhaft
* stelle und speichere Datum und Zeit
ERR_PERIMETER_TIMEOUT Perimeter-Signal, Zeitüberschreitung
* Überprüfe Perimeter-Sender, Schleife usw.
* Überprüfe die Polarität der Perimeterspule
* veringere 'Perimeter-smag', damit die Auszeit größer wird
* Erhöhe 'Perimeter-timeout-seconds', damit die Auszeit größer wird
* Überprüfe, ob das Signal-Rausch-Verhältnis größer 1 ist.
ERR_TRACKING Perimeter-Folge-Fehler
* Überprüfe Perimeter-Sender, Schleife usw.
* Erhöhe 'Perimeter-tracking-timeout', damit die Auszeit größer wird
ERR_ODOMETRY_LEFT Odometrie-Fehler linker Motor
* Überprüfe das linke Odometrie-Kabel
* Überprüfe die Drehrichtung des linken Motors
ERR_ODOMETRY_RIGHT Odometrie-Fehler rechter Motor
* Überprüfe das rechte Odometie-Kabel
* Überprüfe die Drehrichtung des rechten Motors
ERR_BATTERY Akku-Fehler
* Überprüfe Akku-Verbindung
ERR_CHARGER Ladefehler
* Überprüfe Verbindung zum Ladegerät
ERR_GPS_COMM GPS Kommunikationsfehler
* Überprüfe GPS-Kabel
ERR_GPS_DATA GPS Datenfehler
* Überprüfe GPS-Antenne und -Kabel
ERR_ADC_CALIB ADC Abgleich-Fehler
* Starte 'ADC calibration' (entweder über Konsole oder pfodApp->ADC calibration)
ERR_EEPROM_DATA EEPROM Datenfehler
* Speichere Benutzer-Einstellungen (entweder über Konsole oder pfodApp->Settings-Save)
Nach Behebung des Fehlers kann dieser gelöscht werden:
Konsole: press... d for menu e=delete all errors
I2C Fehler
Der I2C Bus muss einwandfrei funktionieren. Eine Konsolenausgabe welche bei der Zeile 'initL3G4200D' anhält deutet auf einen fehlerhaften I2C Bus hin.
Serieller Monitor auf Android-App ausgeben
Für den mobilen Einsatz kann man den seriellen Monitor per USB auch auf einem Android-Smartphone oder Android-Tablett ausgeben.
- Android-App "Simple Serial Monitor" von Bernard Bekker aus dem Playstore herunterladen
- Smartphone oder Tablett mit der OTG-Funktion (Bereitstellung eines USB-Host)
- passendes OTG-Kabel
- USB-Kabel
Die USB-Schnittstelle des Arduino Mega mit dem USB-Stecker des OTG-Kabels verbinden und dann die Android-App "Simple Serial Monitor" aufrufen. Die Übertragungsgeschwindigkeit einstellen und den Button "Start" drücken.
Damit steht ein vollwertiger serieller Monitor analog zur Arduino-IDE zur Verfügung. Es werden alle Systemmeldungen ausgegeben. Über die Kommandozeile können die üblichen Befehle aufgerufen werden.

Serieller Monitor

Deaktiviere alle Pins, die nicht angeschlossen sind
Stelle sicher, dass alle Pins und Eigenschaften die nicht angeschlossen sind (nicht verwendet werden), in der Roboter-Konfiguration deaktiviert sind.
Beispiel: Wenn du die Odometrie-Pins nicht beschaltet hast, muss Odometrie in der Roboter-Konfiguration deaktiviert werden. (mower.cpp):
odometryUse = 0; // use odometry?
Probebetrieb ohne Mähmotor-Treiber
Sofern man den Ardumower im Probebetrieb ohne Mähmotor-Treiber testen möchte, so ist der PIN "pinMotorMowFault" auf High zu setzen. Damit verschwindet die Fehlermeldung "Error: Motor mow fault" und der Mover kann getestet werden.
Drehen die Motoren richtig?
Führe einen Motortestlauf aus. Gehe in die serielle Konsole (Arduino IDE: STRG+SHIFT+M, 19200 Baud) drücke 'd' und ENTER um ins Menü zu gelangen. Dann drücke '1' und ENTER. Es startet der Motortest.
Unerwartete Sensorauslösung
Wenn dein Roboter etwas Unerwartetes tut, kann es an einem Sensor liegen, der fehlerhaft auslöst. Überprüfe das über die serielle Konsole:
Starte die serielle Konsole (Arduino IDE: CTRL+SHIFT+M, 19200 Baud), und schalte den Roboter ein. Jedes Mal, wenn ein Sensor auslöst, wird der Zähler dieses Sensors erhöht. Siehe Beschreibung der Sensoren weiter unten. Wenn sich also der Roboter nicht so verhält, wie er soll, dann schau dir die Sensor-Zähler an und stelle fest, welcher Zähler hochzählt, um das Problem zu lokalisieren.
Einige Sensoren lösen nicht aus?
...
Keine Verbindung über Bluetooth
- Stelle sicher, dass die Baudrate des BT-Modules richtig eingestellt ist (verwende die Ardumower Konsole) - Aktiviere den Programmier-Modus des BT-Modules und stelle die Baudrate ein Bluetooth & App.
- Stelle sicher, das das BT-Modul mit dem Handy "gepaart" ist
- Überprüfe, dass der Arduino Mega nicht über USB mit Strom versorgt wird.
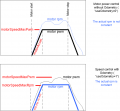
Roboter dreht sich im Kreis wenn er auf die Schleife trifft (Home Modus)
Zunächst sicherstellen, dass das Perimeter Tracking funktioniert: den Roboter manuell auf die Schleife setzen und via ArduRemote "Commands->Track" wählen und sicherstellen dass der Robote die Schleife abfährt. Falls dies nicht klappt könnte ein Tuning der Tracking PID-Parameter helfen.
Die Position der Spule sollte wie angegeben sein:

Chassis components

Wenn er über die Schleife fährt (Spule liegt dann also "außerhalb" der Schleife) muss er ja durch Drehen wieder mit der Spule nach "innerhalb" der Schleife kommen. Wenn das durch Drehen nicht klappt würde er nicht mehr aufhöhren mit dem Drehen.
Je weiter er drüber gefahren ist umso schlechter kann er die Spule durch Drehen wieder nach "innerhalb" bekommen. Die Fahrgeschwindigkeit zu reduzieren und die Positionierung der Spule nach weiter außen sollte helfen.
Folgender Test ist hilfreich: In der ArduRemote-App unter "Plot->Perimeter" lässt Du Dir den Schleifen-Plot anzeigen. Hier werden die einzelnen Werte erklärt: http://wiki.ardumower.de/index.php?title=Perimeter-Schleife#Problemanalyse_und_Fehlerbehebung_am_Empf.C3.A4nger
Dann setzt Du den Roboter mit der Hand manuell an die Position wo Du meinst dass er die Schleife erkannt hat ("mag" sollte dort von negativ zu positiv wechslen bzw. "in" zu "out"). Jetzt drehst Du den Roboter mit der Hand (also ohne Motor) und schaust ob "mag" wieder von positiv zu negativ wechselt (bzw. "out" zu "in"). Wenn das nicht klappt stimmt etwas mit der Position der Spule nicht bzw. der Roboter fährt zu weit über die Schleife (dann die Geschwindigkeit verringern).
Konsolen-Ausgabe
Beim Start des Roboters wird über die serielle Konsole beispielsweise folgendes ausgegeben:
START Ardumower rXXXX press... d zum Menü v um Konsolenausgabe zu ändern (Sensor-Zähler, Werte, Perimeter usw.)
t 0 l177 v0 FORW spd 33 33 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 20.8 chg 21.7 0.0 imu 0 adc 0 Ardumower t 1 l177 v0 FORW spd 33 33 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 20.8 chg 21.7 0.0 imu 0 adc 0 Ardumower t 3 l177 v0 FORW spd 33 33 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 20.8 chg 21.7 0.0 imu 0 adc 0 Ardumower
Wenn ein Sensor auslöst, wird sein Zähler erhöht.
Beispiel (Mähmotor-Überstromsensor löst aus):
t 4 l177 v0 FORW spd 33 33 0 sen 0 0 0 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 20.8 chg 21.7 0.0 imu 0 adc 0 Ardumower t 5 l177 v0 REV spd -26 -26 0 sen 0 0 1 bum 0 0 dro 0 0 son 0 yaw 0 pit 0 rol 0 bat 20.8 chg 21.7 0.0 imu 0 adc 1 Ardumower
Hier ist eine Beschreibung jeder Spalte:
t - Zeit des akt. Maschinenzustands (ms) l - Programmschleifen-Durchläufe/sek v - Anzeige-Modus des ausgewählten Sensors (0 = Zähler / 1 = Sensorwerte / 2 = Sensorwerte) - aktueller Status (FORW, REV, ROLL usw.) - Nachhause-Fahrt? (1/0) spd - Steuerung / Drehzahl der Motoren: links (PWM), rechts (PWM), Mähmotor (speed) sen - Motor-Überstromzähler: links, rechts, Mähmotor bum - Bumperzähler: links, rechts son - Ultraschall- Distanz-Unterschreitung: Zähler pit, roll - inclination (berechnet mit Beschleunigungssensor) yaw - Kompass-Kurs bat - Akkuspannung chg - Ladespannung
---Befehle---
'd': Testmenü, Abgleich IMU, Bluetooth 'v': Anzeigemodus(zeigt Werte oder Zähler 'h': Fahr zur Ladestation 'p': Schleifenfahrt 'l': simuliert linken Bumper 'r': simuliert rechten Bumper 's': simuliert Rasensensor 'm': schaltet Mähmotor 'c': simuliert Laden '+': drehen 90 Grad '-': drehen 90 Grad '3': aktiviert Fernsteuerung '0': Aus '1': Automode, Mähmotor an
Bluetooth
Der Ardumower kann drahtlos überwacht und gesteuert werden:
- über Handy/Tablet (Android App)
- über USB Bluetooth Dongle (PC serial console)
Auf den Handy/Tablet benötigst du folgende App 'ArduRemote'. alternativ kannst du diese App benutzen 'pfodApp'.
Das Handy-Menü enthält:
- Statusinformationen (Akku-Spannungg, Ladestrom usw.)
- Einstellungen (Timer usw.)
- Abgleich (Motor, IMU etc.)
- Fernsteuerung (Start/Stop, Ein/Aus Mähmotor, Messermodulation usw.)

Live-Konfiguration, Überwachung und Fehlersuche

Android App Menü

Android App (pfodApp)

Android App (ArduRemote)

PC-Kommunikation über Bluetooth USB Dongle





Bluetooth Module
Am Roboter wird das Bluetooth-Modul HC-05 verwendet, welches das das Serial Port Profil (SPP) unterstützt. SPP verwendet das Bluetooth Service Discovery Protocol (SDP) und das RFCOMM protocol.
Bluetooth HC-05

PCB and HC-05 module

HC-05 Modul
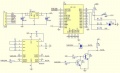
HC-05 Schaltung
HC-05 mit Taster




Zur Programmierung wird der Key-Pin des BT-Modules mit 3,3V vom Arduino verbunden und danach die Verbindung wieder getrennt.
Wiring:
Bluetooth HC05 VCC --- PCB VCC Bluetooth HC05 GND --- PCB GND Bluetooth HC05 TX --- PCB RX Bluetooth HC05 RX --- PCB TX
Besonderheiten: Je nach Lieferant wird das HC-05 Modul mit 5 Volt VCC betrieben; Aufschrift "Power 3.6-6V"(JP 8 anstelle von JP 9 setzen). Sofern sich am Pin "EN" ein Microtaster befindet (siehe Foto), so muss dieser während der Konfiguration gedrückt sein, da ansonsten das Modul nicht erkannt wird. Key-Pin muss wie beschrieben auf +3,3 Volt gesetzt sein (JP 2). Rx/Tx laufen auch hier mit 3,3 Volt.
Die Schritte im Einzelnen
- Konfigurationsmodus: Das Bluetooth-Modul muss für die nächsten Schritte im Konfigurationsmodus sein:
- für HC05: Nachdem das Modul an die Betriebsspannung angeschlossen wurde, verbinde den KEY-Pin mit 3,3V
- für HC06/linvor: nicht paaren/verbinden (LED muss blinken)
- für FBT06/MBTV4: Zuerst muss ein dünner Draht von Pin PIO11 nach VCC (PIN 12)das sind 3.3 Volt gelötet werden.
- Baudrate: Das Bluetooth-Modul und der Arduino Mega müssen die gleiche Baudrate (19200) verwenden - Die Baudrate des Bluetooth-Modules kann über die serielle Konsole des Ardumowers geändert werden. Verbinde das Ardumower Mega Board mit deinem PC (USB), gehe in die serielle Konsole in der Arduino IDE (Strg+M), und wähle dort Baudrate 19200, dann drücke Taste 'd' um ins Ardumower-Menü zu gelangen, dann Taste '3' for Kommunikationsmenü, dann Taste '3' um die richtige Baudrate für das BT-Modul einzustellen.
- Neustart: Nachdem das BT-Modul erfolgreich konfiguriert wurde, muss die Verbindung des KEY-Pins zu 3,3V wieder getrennt werden (HC05). Danach startet man das Modul neu.
- Pairing: Das BT-Modul muss dem Handy oder Tablet (über Android/Einstellungen) bekanntgemacht werden. Diesen Vorgang nennt man Pairing. Wähle auf dem Android-Gerät das Symbol "Einstellungen" (über Android Menü). Nun wähle "Drahtlos und Netzwerke/Bluetooth->Bluetooth Einstellungen" und "Finde Gerät(Scannen)". Wurde der Ardumower in der Liste der gefundenen Geräte angezeigt, wählt man ihn aus und sagt dann -verbinden-. Nach der Eingabe der Sicherheits-PIN (als Vorgabe "1234"), sollte das Bluetooth-Modul des Arduino mit dem Handy gepaart sein (paired).
- pfodApp: Jetzt kann die APP pfodApp/ArduRemote gestartet werden und sich mit dem Ardumower verbinden.
- Nach erfolgreichem Verbinden leuchtet die Diode D8.
Kommunikation-Protokoll
Das Kommunikation-Protokoll für die Verbindung zwischen Roboter und Androis-App (die 'pfodSpecification') ist hier definiert: http://www.forward.com.au/pfod/.
Alle Menüs (Menüpunkte, Schieberegler, Taster) werden innerhalb der Robotersoftware definiert. Die App stellt die kreierten Menüs nur dar und sendet einen Befehl zurück, wenn ein Menüpunkt durch den Benutzer angeklickt wurde.
Beispiel Kommunikation:
1. App verlangt das Hauptmenü: {.}
2. Roboter sendet Hauptmenü zur App: {.title`1000|key1~text1|key2~text2|key3~text3}
Die App stellt das Hauptmenü wie folgt dar:
title [text1] [text2] [text3]
3. Der Benutzer klickt den Menüpunkt 'text1' an, die App sendetden entsprechenden Befehl {key1} zurück
Man kann die Kommunikation protokollieren und in einer Datei auf dem Handy/Tablet speichern (Ordner 'pfodAppRawData' or 'ArduRemote'). In ArduRemote, muss man noch die 'Android Menütaste' drücken und 'Enable logging' wählen.

Android Menütaste

Sensor-Protokollierung
For PC data analysis, algorithm modelling and optimization, you can collect robot sensor data using pfodApp like this:
- Using your Android pfodApp, connect to your robot and choose 'Log sensors'. The logged sensor data will be displayed. Click 'Back' to stop logging (NOTE: for ArduRemote, press Android menu button before and choose 'Enable logging' to enable file logging).
- Connect your Android phone to the PC, if being asked on the phone choose 'Enable as USB device', so you phone shows as a new Windows drive on your PC.
- On your PC, launch Windows Explorer and choose the new Android drive, browse to the 'pfodAppRawData' folder (for ArduRemote: 'ArduRemote' folder), and copy the data file to your PC (you can identify files by their Bluetooth name and date).

1. Start pfodApp

2. Choose 'Log sensors'

3. Choose phone back button or 'Exit'

4. Connect to your PC via USB, choose 'Enable as USB device'

5. Using Windows explorer, browse to folder 'pfodAppRawData' on external Android drive to access sensor log file





Videos
Wie melde ich einen Programmfehler/eine neue Eigenschaft/neuen Programmcode
Klicke auf 'this link' und erzeuge ein neues Thema - bitte teile uns folgendes mit:
Deine Plattform (Arduino Mega 2560, Arduino Due) Deine Arduino IDE-Version (der letzte Programmcode erfordert 1.6.3) Dein genaues Betriebssystem (Windows 8, Linux usw.) Deine Ardumower-Programmversion (eine Liste der Veröffentlichungen siehst du hier https://github.com/Ardumower/ardumower/releases) Jede andere Info, die brauchbar sein kann...