Perimeter-Schleife: Unterschied zwischen den Versionen
Pemiso (Diskussion | Beiträge) (→Zusammenfassung) |
(→Einstellen der Sendeleistung) |
||
| (172 dazwischenliegende Versionen von 4 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
=Zusammenfassung= | =Zusammenfassung= | ||
| − | Eine | + | Eine Begrenzungsschleife (oder Perimeterdraht) ist eine Art 'elektronischer Zaun': er veranlaßt den ArduMower zum Stoppen / Umkehren sobald die Grenze erreicht ist. Nicht in jeder Umgebung ist eine Begrenzungsschleife notwendig. |
| − | Das Prinzip: im Garten wird | + | Das Prinzip: durch den im Garten verlegten Schleifendraht wird ein Signal gesendet, das der Ardumower ausgewertet. Gebraucht werden ein Sender zur Erzeugung und Übergabe des Signals an die Schleife und ein Empfänger zur Signalauswertung im ArduMower. |
| − | Und so wird das Signal empfangen: eine | + | Und so wird das Signal empfangen: eine Empfangsspule liefert ein Signal, dessen Stärke je nach Abstand zwischen Schleifendraht und Empfangsspule variiert. Interessanterweise wechselt das Signal in dem Moment seine Polarität, wo der ArduMower (genauer: die Empfänger-Spule) den Schleifendraht überfährt. |
<gallery> | <gallery> | ||
File: Ardumower_perimeter.jpg | Perimeterdraht | File: Ardumower_perimeter.jpg | Perimeterdraht | ||
| − | |||
File: Perimeter_signal_strength.jpg | Signalstärke | File: Perimeter_signal_strength.jpg | Signalstärke | ||
File: Perimeter_gradient.png | Verlauf der Signalstärke | File: Perimeter_gradient.png | Verlauf der Signalstärke | ||
| − | |||
File: Perimeter_excluding_objects.png | Objekte ausschließen | File: Perimeter_excluding_objects.png | Objekte ausschließen | ||
File: Perimeter_divide.png | Flächen aufteilen | File: Perimeter_divide.png | Flächen aufteilen | ||
</gallery> | </gallery> | ||
| − | + | =Begrenzungsschleife= | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | = | + | |
[[Image:Yt-brand-standard-logo-95x40.png|thumb|180px|https://www.youtube.com/watch?v=NIer_kITelc&feature=youtu.be]] | [[Image:Yt-brand-standard-logo-95x40.png|thumb|180px|https://www.youtube.com/watch?v=NIer_kITelc&feature=youtu.be]] | ||
| − | Dies ist die neue Version von Sender und Empfänger für die | + | Dies ist die neue Version von Sender und Empfänger für die Begrenzungsschleife (erhältlich über den [https://www.marotronics.de/index.php?k=7 shop] [[File: shopping.png|link=https://www.marotronics.de/index.php?k=7]]). |
| − | Beim Überfahren des | + | Beim Überfahren des Schleifendrahtes passiert nun etwas Interessantes: die Polarität der Signalspannung wechselt von negativ auf positiv bzw. umgekehrt - je nachdem, ob man von innen oder außen kommt. Dadurch werden sowohl das Überfahren selbst als auch der Status (Aufenthalt innerhalb oder außerhalb der Schleife) eindeutig erkennbar. Wie bei der V1 nutzen wir zur Signalverstärkung wieder den Motortreiber für das Ausgangssignal und einen Operationsverstärker für das Eingangssignal von der Empfangsspule. Der Sender übergibt eine digitale Signalfolge (auch als 'pseudo-noise' bezeichnet) an die Schleife, die vom Empfänger über einen software-basierten digitalen [http://en.wikipedia.org/wiki/Matched_filter Matched-Filter] ausgewertet wird. Der Filter liefert als Ergebnis einen Peak: positiv - ArduMower innerhalb oder negativ - ArduMower außerhalb der Begrenzungsschleife. |
| − | Prinzipablauf: | + | Prinzipablauf Sender: |
| − | + | # Erzeugen des Ausgangssignals durch den Arduino Nano (ca. 3 Khz) | |
| − | # Erzeugen des Ausgangssignals durch den Arduino Nano | + | |
# Verstärkung des Ausgangssignals durch den Motortreiber (MC33926), Schleifendrahtenden anstatt eines Motors an den Ausgang anschließen | # Verstärkung des Ausgangssignals durch den Motortreiber (MC33926), Schleifendrahtenden anstatt eines Motors an den Ausgang anschließen | ||
| − | + | Prinzipablauf Empfänger: | |
# Eingangssignal per Empfangsspule aufnehmen | # Eingangssignal per Empfangsspule aufnehmen | ||
| − | # Eingangssignal per Operationsverstärker ( | + | # Eingangssignal per Operationsverstärker (LM386) verstärken |
| − | # ADC sampling durch Arduino Mega | + | # ADC sampling durch Arduino Mega (mit 9615 Hz) |
| − | # Signalfilterung and Analyse durch ein digitales Filter (software-basierter | + | # Signalfilterung and Analyse durch ein digitales Filter (software-basierter Matched-Filter-Algorithmus) |
| − | # Auswertung des matched filter Ergebnisses (zur Feststellung des Aufenthaltbereiches | + | # Auswertung des matched filter Ergebnisses (zur Feststellung des Aufenthaltbereiches inner- / außerhalb der Schleife, Schleifenabfahren usw.) |
| + | |||
| + | Folgende Bilder erklären den Wechsel der Signalpolarität innerhalb und außerhalb der Schleife. Sie zeigen auch die Richtung der magnetischen Flusslinien, die vom Begrenzungsdraht ausgehen und wie sie die Spule innerhalb und außerhalb der Begrenzungsschleife treffen. | ||
| − | + | Für ein besseres Verständnis des Filters gibt es den [http://www.grauonline.de/alexwww/ardumower/filter/filter.html Matched Filter Simulator]. Für weitere Informationen zum Filter, schaue Dir auch das [https://www.youtube.com/watch?v=NIer_kITelc Matched Filter Video] an. Using a simple symmetric signal (which looks equal on positive and negative side of the zero point), you cannot differentiate between an 'inside perimeter' and 'outside perimeter' signal. When the mower is traversing the perimeter loop, the signal polarity changes (positive becomes negative and negative becomes positive). We want to detect this polarity change of the signal. Using an unsymmetrical signal, you can do this. You can see the difference in the simulator. The default signal (slider 'example signal') is a symmetric signal - press the 'Invert' button to invert the signal (change its polarity). In the correlation result (graph 'Matched filter') the polarity can not be detected. Now use an asymmetrical signal ('pseudonoise5_pw'). Press again 'Invert' to change signal polarity. Now you can see polarity of the signal in the filter output (graph 'Matched filter'). It's the sign of the peak (positive or negative sign). | |
<gallery> | <gallery> | ||
File: Ardumower_perimeter2.jpg| Innen/außen-Erkennung über den Polaritätswechsel | File: Ardumower_perimeter2.jpg| Innen/außen-Erkennung über den Polaritätswechsel | ||
File: Fluxdirections.png| Flussrichtungen | File: Fluxdirections.png| Flussrichtungen | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
File: Perimeter_signal_steps.png | Perimetersignal an Sender und Empfangsspule | File: Perimeter_signal_steps.png | Perimetersignal an Sender und Empfangsspule | ||
| + | File: Matched_filter_principle.png| Matched filter | ||
| + | File: Perimeter_signal_good_bad.png|What makes a good/bad signal | ||
</gallery> | </gallery> | ||
| − | + | == Sender == | |
| + | [[Image:Ina169_marotronics.jpg|thumb|200px| Wichtig für Marotronics INA169: Pads verlöten für 5A Betrieb]] | ||
| + | [[File: Ardumower_perimeter_overview.jpg|600px]] | ||
| − | + | Wir benutzen einen Arduino Nano zur Erzeugung und einen Mototreiber als Ausgangsverstärker des Signals. Der Motortreiber wird mit 3,2 kHz betrieben (2 Impulsbreiten 4808 und 2404 Hz). Unser Motortreiber verfügt über eine integrierte Strombegrenzung und eine Übertemperaturabschaltung (z.B. MC33926) | |
| − | + | ||
| − | + | Anschluss der Induktionsschleife erfolgt am MC33926 zwischen M1OUT1 und M1OUT2. | |
| − | + | [[File:warning.png]] Wichtig: Die Schleifenlänge kann im Bereich 20 - 450m betragen und muss mindestens 5 Ohm bzw. darf maximal 12 Ohm Widerstand aufweisen. Die maximal Begrenzungs-Fläche beträgt 1000 m2. | |
| − | [ | + | |
| − | + | * [https://www.marotronics.de/Perimeter-Sender-Board-Prototyp-mit-Platinen-Zubehoer Sender PCB im Shop] | |
| − | + | * [https://github.com/Ardumower/ardumower/blob/master/pcb/Produzierte_Platinen/sender_v2_geschlossen/Perimeter%20sender%20v2.pdf Sender PCB Schaltbild] | |
| − | + | * [https://github.com/Ardumower/ardumower/tree/master/pcb/Produzierte_Platinen/sender_v2_geschlossen/Platinenbilder Sender PCB Bilder] | |
| − | + | ||
| − | + | === Sendersoftware === | |
| − | < | + | <b>Tipp</b>: Wenn Du Dich nie zuvor mit Arduino beschäftigt hast, lies zuerst unsere Einführung <b>[http://wiki.ardumower.de/index.php?title=Arduino_first_steps 'erste Schritte mit dem Arduino']</b>. |
| − | + | ||
| − | + | ||
| − | </ | + | |
| − | + | <b>Download</b>: | |
| − | < | + | Du findest den Code für den Schleifensender im Ordner 'sender' unter [http://wiki.ardumower.de/index.php?title=Ardumower_LP#Programm_downloaden_und_Arduino_programmieren Ardumower Download] |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | [[File:warning.png]] Wichtig: Vergewissere Dich, dass die Pin-Konfiguration des Arduino im benutzten Code (sender.ino) mit Deinem Senderaufbau übereinstimmt! Falls Dein Arduino Nano sich nicht flashen lässt, schaue bitte [http://wiki.ardumower.de/index.php?title=Arduino_first_steps hier für ein Treiber-Downgrade]. | |
| − | + | === Einstellen der Sendeleistung === | |
| + | Zum Einstellen der Sendeleistung wie folgt vorgehen: | ||
| − | + | [[File:warning.png]] Wichtig: Deine Induktionsschleife sollte mindestens ein Widerstand von 12 Ohm aufweisen. Im Idealfall schaltet man ein 12 Ohm (50W) Lastwiderstand in Reihe. So kommt man dann auf ein Gesamtwiderstand der Begrenzungsschleife die im Bereich von ca 12-15 Ohm liegt. | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | Die Versorgungsspannung des Motortreibers wird über das Poti des DC/DC-Wandlers zwischen 6.5 bis 12V eingestellt. Die Spannung am DC/DC-Wandler so einstellen, dass nicht mehr als 1 Ampere zum fließen kommt. | |
| − | + | ||
| − | + | Beispiel: | |
| − | + | Deine Induktionsschleife hat: 12 Ohm | |
| + | Deine Eingstellte Spannung am DC/DC-Wandler: 8 Volt | ||
| − | + | Der verbrauchte Strom und die verbrauchte Leistung ist dann: | |
| − | + | Strom: I = U / R = 8 Volt / 12 Ohm => 0,7 Ampere | |
| + | Verbrauchte Leistung: P = U * I = 8 Volt * 0,7 Ampere => 5,6 Watt | ||
| − | + | Hochlastwiderstand: Bei einem Schleifenwiderstand kleiner 5 Ohm kann der Strom nicht weiter reduziert werden, indem man die Spannung runterdreht (unterhalb von ca. 6V arbeitet der Motortreiber nicht mehr richtig). Dann hilft nur noch ein zur Schleife in Reihe geschalteter Hochlastwiderstand. Wichtig: der Hochlastwiderstand muss für die Leistung ausgelegt sein! In dem gezeigten Beispiel mit 12 Ohm sollte man also einen 10 Watt Lastwiderstand verwenden. | |
| − | + | ||
| − | + | Weitere Informationen: [http://wiki.ardumower.de/index.php?title=Der_Perimetersender_ohne_automatische_Regelung] | |
| − | + | ||
| − | === | + | === Automatische Schleifensignalabschaltung === |
| − | + | Während sich der ArduMower in der Ladestation aufhält, wird das Schleifensignal nicht benötigt und wir können Energie sparen. Zum Erkennen des Ladestatus befindet sich auf dem Sender PCB ein Stromsensor (INA169, 5A) zwischen Ladegerät und Ladeanschlüsse. | |
| − | + | Zum Aktivieren dieser Funktion ist "#define USE_CHG_CURRENT" auf 1 zu setzen | |
| − | + | #define USE_CHG_CURRENT 1 // use charging current sensor for robot detection? (set to '0' if not connected!) | |
| − | + | === Sender Diagnose === | |
| + | Die LED auf dem Arduino Nano signalisiert den Senderstatus: | ||
| + | * An: Perimeterschleife ist angeschlossen und arbeitet | ||
| + | * Aus: Perimeterschleife ist geöffnet (oder durch Defekt unterbrochen) und arbeitet nicht | ||
| + | * Blinkt: der ArduMower wird geladen und die Perimeterschleife ist zur Energieeinsparung durch die Software deaktiviert | ||
| − | + | Bei der Platine "Sender V2" ist dieses Signal am Ausgang "D13" verfügbar und auf die LED "Mover_in_Ladestation" geschaltet. | |
| − | + | Um Fehler zu finden bzw. um den Schleifensender besser zu verstehen, öffne mit der Arduino IDE die serielle Konsole (CTRL+SHIFT+M) auf 19200 Baud. Hier ein Beispiel der möglichen Zustände (Roboter in Ladestation/Roboter nicht in Ladestation usw.): | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
<gallery> | <gallery> | ||
| − | File: | + | File:Perimeter_sender_console.png|Fehlersuche mit serieller Konsole |
</gallery> | </gallery> | ||
| − | + | == Empfänger == | |
| − | + | [[File: Perimeter_v2_receiver_circuit.png|400px]] | |
| − | + | Zum Signalempfang verwenden wir eine Spule (100 mH or 150 mH) in aufrechter Position, in der Mitte am vorderen Rand des ArduMower. Sie ist zur Verstärkung des empfangenen Signals mit dem Eigang eines [https://www.marotronics.de/Schleifenempfaenger-Kit-perimeter-receiver-Kit LM386 Operationsverstärkers] verbunden. Auf dem LM386 Modul wird der Kondensator C3 überbrückt, damit der Verstärker ein Signal zwischen 0..5V statt im Standardbereich -5V..+5V) liefert. Der Ausgang des LM386 sollte mit dem Arduino Analog-Pin ('pinPerimeterLeft') verbunden werden. Der Analog-Pin 'pinPerimeterRight' wird bei Verwendung des Senders V2 nicht benötigt. | |
| − | + | ||
| − | + | ||
| − | + | <gallery> | |
| − | + | File: Ardumower_chassis_components.png | Position der Perimeterspule | |
| + | File: Ardumower_coil_position.jpg | Eine zentrierte, aufrecht montierte Spule | ||
| + | File: Ardumower_lm386_circuit.png | LM386 Modul Schaltplan | ||
| + | File: Dcdc_noise.jpg | NOTE: Perimeterspule/Verstärker von DC/DC-Wandlern fernhalten (Störstrahlung)! | ||
| + | File: Tire_coil_distance.jpg | Abstand Spule-Rad: Einfluß auf den Wendekreis (Kurvenwinkel) | ||
| + | </gallery> | ||
| − | + | [https://www.marotronics.de/Schleifenempfaenger-Kit-perimeter-receiver-Kit Das Empfänger-Kit ist erhältlich im Shop] | |
| − | |||
| − | + | '''Achtung''': Die Spule muss direkt an den Verstärkermodul angeschlossen werden. So wird die Störfestigkeit des schwachen Spulensignals gegenüber Einflüssen anderer Komponenten (Motore, DC-DC-Wandler) verbessert. | |
| − | + | '''Wichtig''': Die aktuelle Software erfordert das Weglassen des Kondensators 4.7nF in Reihe mit der Spule ('differential signal'). | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| + | ===Einstellungen=== | ||
<gallery> | <gallery> | ||
| − | File: | + | File:Cheat_sheet.png | Perimeter settings |
</gallery> | </gallery> | ||
| − | + | At first, activate the perimeter in the Ardumower software (pfodApp->Options->Perimeter Use: YES). It is recommended to keep the default perimeter settings. | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | The perimeter settings are: | |
| − | + | * Timed-out if below smag (timedOutIfBelowSmag) - default setting: 300 | If smag below this value, sender is considered as off (perimeter timeout appears) | |
| + | * Timeout (s) if not inside (timeOutSecIfNotInside) - default setting: 8 | ||
| + | * Trigger timeout (perimeterTriggerTimeout) - default setting: 0 | Perimeter outside trigger timeout when escaping from inside (ms) | ||
| + | * Perimeter out roll time max (perimeterOutRollTimeMax) - default setting: 2000 | Max (random generator) roll time after perimeter out (ms) | ||
| + | * Perimeter out roll time min (perimeterOutRollTimeMin) - default setting: 750 | Min (random generator) roll time after perimeter out (ms) | ||
| + | * Perimeter out reverse time (perimeterOutRevTime) - default setting: 2200 | Time to drive reverse after perimeter out (ms) | ||
| + | * Perimeter tracking roll time (perimeterTrackRollTime) - default setting: 1500 | Hit obstacle while tracking: roll time | ||
| + | * Perimeter tracking reverse time (perimeterTrackRevTime) - default setting: 2200 | Hit obstacle while tracking: reverse time | ||
| + | * Transition timeout (trackingPerimeterTransitionTimeOut) - default setting: 2000 | Max. time required for a in/out transition during tracking, robot will start rotating after this timeout | ||
| + | * Track error timeout (trackingErrorTimeOut) - default setting: 10000 | Max. time required for a in/out transition during tracking, robot will go into error after this time | ||
| + | * Track_P (perimeterPID.Kp) - default setting:51 | Perimeter PID "P" setting | ||
| + | * Track_I (perimeterPID.Ki) - default setting:12.5 | Perimeter PID "I" setting | ||
| + | * Track_D (perimeterPID.Kd) - default setting:0.8 | Perimeter PID "D" setting | ||
| + | * Use differential signal (useDifferentialPerimeterSignal) - default setting: YES | Use differential signal (see signal section) | ||
| + | * Swap coil polarity (swapCoilPolarity) - default setting:NO | ||
| + | * Block inner wheel (trackingBlockInnerWheelWhilePerimeterStruggling) - default setting: YES | robot is wheel-spinning while tracking => roll to get ground again | ||
=== Abstand Spule/Verstärker zu Motoren === | === Abstand Spule/Verstärker zu Motoren === | ||
| − | + | Achte auf die Einhaltung aller Mindestabstände zwischen den folgenden Komponenten: | |
| − | * | + | * Spule zu Radmotor: > 15cm |
| − | * | + | * Spule zu Mähmotor: > 10cm |
| − | * | + | * Spule zu DC-DC Wandler: > 10cm |
<gallery> | <gallery> | ||
| − | File: Dcdc_noise.jpg | | + | File: Dcdc_noise.jpg | Achtung: Halte Spule/Vorverstärker von den DC-DC-Wandlern und Motoren fern |
</gallery> | </gallery> | ||
=== Signalmessungen === | === Signalmessungen === | ||
| − | + | Sender / Spule / LM386 Verstärker Ausgangssignale sollten etwa so aussehen: (witere Details über das Signal s. Abschnitt Signal) | |
<gallery> | <gallery> | ||
| − | File: Perimeter_signal_steps.png | | + | File: Perimeter_signal_steps.png | Signal am Sender und an Empfangsspule und LM386 (Prinzip) |
| − | File: coil_signal_without_capacitor.png | | + | File: coil_signal_without_capacitor.png | Sender-Signal / Spulensignal (5V sender, 5 Ohm Schleife - blau: Perimeter, gelb: Spule, grau: LM386 Verstärkerausgang) |
| − | File: | + | File: Perimeter2_sender_open.jpg| Sendersignal (6.5V, ohne Perimeterschleife) |
| − | + | File: Lm_output_dc_noise.jpg | Schleifen-Empfänger: LM386 Ausgang mit DC Störungen | |
| − | File: | + | |
| − | + | ||
</gallery> | </gallery> | ||
| − | === | + | === ADC-Kalibrierung am Empfänger === |
| − | + | [[File:warning.png]] Die ADC-Kalibrierung (bei ausgeschaltetem Sender!) sorgt für eine korrekte Erkennung der Nulllinie (Stille), sodass das empfangene Signal später symmetrisch zur Nulllinie angezeigt wird. | |
| − | + | # Der Perimetersender und die Motoren des ArduMower müssen während der Kalibrierung ausgeschaltet sein! | |
| − | + | # Wenn eine Störung durch einen anderen Sender nicht zu vermeiden ist, muß während der Kalibrierung die Spule entfernt und der Eingang es LM386 mit GND verbunden werden. | |
| − | + | # Führe die ADC-Kalibrierung einmal aus ("pfodApp->ADC Calibration") | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | [[File:warning.png]] | + | |
| − | # | + | |
| − | # | + | |
| − | # | + | |
| − | + | Nach der korrekt durchgeführten Kalibrierung sollte das Signal per pfodApp Plot ('sig') bei ausgeschaltetem Perimetersender ungefähr als Null angezeigt werden. Nach Einschalten des Perimetersenders sollte das Signal etwa diesselbe positive wie negative Maximalamplitude ('Symmetie zur Nulllinie') aufweisen. | |
<gallery> | <gallery> | ||
| − | File: perimeter_v2_sig_symmetric.jpg | | + | File: perimeter_v2_sig_symmetric.jpg | symmetrisches Signal bei eingeschaltetem Sender (nach ADC-Kalibrierung) |
| − | File: perimeter_v2_sender_off.jpg | | + | File: perimeter_v2_sender_off.jpg | Nullsignal bei ausgeschaltetem Sender (nach ADC-Kalibrierung) |
</gallery> | </gallery> | ||
| − | === | + | === Problemanalyse und Fehlerbehebung am Empfänger === |
| − | + | Empfangenes Signal, Filterergebnis und Signalqualität können per Android Handy über die pfodApp->Plot->Perimeter angezeigt werden: | |
<gallery> | <gallery> | ||
| − | File: Perimeter_snr.png | Signal- | + | File: Perimeter_snr.png | Signal-Rausch-Verhältnis (SNR) |
| − | File: Perimeter_signal_38khz.png | | + | File: Perimeter_signal_38khz.png | Signal, Filterergebnis, LP Filterergebnis, innen/außen, Ereigniszähler, Signal ein/aus, Signalqualität |
| − | File: Perimeter_plot_moving_from_inside_to_outside.png | | + | File: Perimeter_plot_moving_from_inside_to_outside.png | Fahren von innen nach außen |
File: Perimeter_v2_plot.png | File: Perimeter_v2_plot.png | ||
File: Perimeter_v2_plot_new.png | File: Perimeter_v2_plot_new.png | ||
| Zeile 306: | Zeile 201: | ||
</gallery> | </gallery> | ||
| − | Plot | + | Beschreibung der im Plot angezeigten Signalverläufe: |
| − | sig: | + | sig: Spulensignal (Sequenz der Rohimpulse nach ADC) als kurzer Snapshot (32 samples), Update alle 20 Sekunden |
| − | ( | + | (also 20 Sekundenwarten bis zum nächsten Snapshot) |
| − | mag: | + | mag: Filterergebnis: innen (negativ) oder außen (positiv), magnitude: Abstand zur Perimeterschleife / magnetische Signalstärke (RSSI) |
| − | - | + | - wird benutzt zum <b>Perimeter verfolgen</b> |
| − | smag: | + | smag: Filterergebnis, low-pass-gefiltert, ohne Vorzeichen (geglätteter mag-Verlauf) - verwendet zur Erkennung des <b>'Sender-aus' Zustandes</b> |
| − | + | Der Grenzwert kann über die pfodApp gesetzt werden (Settings->Perimeter->Timed-out if below smag) | |
| − | in: | + | in: binäres Ergebnis des low-pass Filters: innerhalb (1) oder außerhalb (0) der Perimeterschleife - wird benutzt zur <b>Erkennung des Perimetergrenzverlaufs</b> |
| − | + | Ist der ArduMower eine bestimmte Zeit außerhalb der Schleife, geht er in den Fehlerstatus. Diese Zeit kann per pfodApp | |
| − | (Settings->Perimeter->Timeout (s) if not inside) | + | (Settings->Perimeter->Timeout (s) if not inside) eingestellt werden |
| − | cnt: | + | cnt: Anzahl der Wechsel von innen nach außen (counter, Zähler) |
| − | on: | + | on: Perimetersender ist aktiv, Roboter innerhalb und smag ausreichend (1) oder inaktiv/außerhalb/smag zu klein (0) |
| − | qty: <b> | + | qty: <b>Signalqualität</b> (Aussage über die Verläßlichkeit der Erkennung 'innerhalb / außerhalb' aus dem Filterergebnis) |
| − | + | Verhältnis aus Vergleich mit Mustersignal zu Vergleich mit inversem Mustersignal | |
| − | 1.0 | + | 1.0 bedeutet schlechte Qualität, Du solltest Werte von 1.5 oder höher) |
| − | + | Im Plot soll der 'mag'-Verlauf frei von Spitzen sein: innerhalb der Schleife sollte das Signal eine negative Kurve, außerhalb eine positive Kurve beschreiben. Weist die Kurve Spitzen auf, versuche folgende Maßnahmen zur Fehlerbeseitigung bzw. Optimierung: | |
| − | * | + | * Verbinde die Empfangsspule mit 'pinPerimeterLeft' auf dem PCB (am falschen Pin könnte das Signal 'etwas schwach' reinkommen) |
| − | * | + | * Verringere smag-Mindestwert via 'pfodApp->Options->Perimeter->Timed-out if below smag' |
* Die Spulenpolung kann per pfodApp eingestellt werden (wird 'außen' angezeigt, wenn der Ardumower sich innrhalb der Schleife befindet?). Denselben Effekt hat das Umklemmen der Schleifenenden am Senderausgang. | * Die Spulenpolung kann per pfodApp eingestellt werden (wird 'außen' angezeigt, wenn der Ardumower sich innrhalb der Schleife befindet?). Denselben Effekt hat das Umklemmen der Schleifenenden am Senderausgang. | ||
| − | * Sollte das Signal schwach erscheinen, überprüfen, ob am Spulenverstärker das Poti "voll aufgedreht" ist! Hilfreich ist die | + | * Sollte das Signal schwach erscheinen, überprüfen, ob am Spulenverstärker das Poti "voll aufgedreht" ist! Hilfreich ist die gleichzeitige Anzeige des Signal per pfodApp (Plot --> Perimeter). |
| − | * | + | * Die Kabelverbindung zwischen Spule und LM386-Vorverstärker muss möglichst kurz sein - am Besten die Spule direkt am Verstärker anschließen! |
| − | * | + | * Halte den Abstand zwische Spule und Motoren sowie DC/DC-Wandlern möglichst groß (30cm oder mehr!) |
| − | * | + | * Nutze die magnetische Abschirmwirkung (z.B. Deines Akkus) zwischen Spule und Störquellen. |
| − | + | ||
| − | + | ||
| − | + | Weitere Fehlerquellen: | |
| − | + | [http://wiki.ardumower.de/index.php?title=Der_Perimetersender_ohne_automatische_Regelung] | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
=== Videos === | === Videos === | ||
| − | #[http://www.youtube.com/watch?v=FL6K98B2Zsk&feature=player_detailpage#t=265 Perimeter2 | + | #[http://www.youtube.com/watch?v=FL6K98B2Zsk&feature=player_detailpage#t=265 Perimeter2 Demo] |
| − | #[https://www.youtube.com/watch?v=QCA6Dm3rs3M 120m | + | #[https://www.youtube.com/watch?v=QCA6Dm3rs3M Test 120m Perimeterschleife] |
| − | #[https://www.youtube.com/watch?v=NIer_kITelc | + | #[https://www.youtube.com/watch?v=NIer_kITelc Theorie zu Perimeterschleife und Matched Filter (in deutsch)] |
| − | #[https://www.youtube.com/watch?v=VxJN2xb55dU&feature=youtu.be Sender PCB] | + | #[https://www.youtube.com/watch?v=VxJN2xb55dU&feature=youtu.be Sender-PCB] |
| + | #[http://www.youtube.com/watch?v=FGaUSg-uUxk Perimeter Stoptest] | ||
| + | #[http://www.youtube.com/watch?v=8R8QaffNlJw Perimeter Verfolgungstest] | ||
| + | #[http://www.youtube.com/watch?v=CftrnetFVYc&feature=youtu.be Test zum Finden und Verfolgen mit L50] | ||
| + | #[http://www.youtube.com/watch?feature=player_embedded&v=fjuQViS2rHM Test zum Finden und Verfolgen mit Rotenbach] | ||
| + | #[http://youtu.be/r4ZMgasMkH0 Magnetfeld Demovideo] | ||
| − | = | + | = Verfolgung der Begrenzungsschleife = |
| − | + | Das Abfahren der Schleife wird über einen softwareseitig realisierten digitalen PID-Regler gesteuert. Die Regler-Parameter (P,I,D) können über ein Android-Handy per pfodApp eingestellt werden. | |
<gallery> | <gallery> | ||
| Zeile 362: | Zeile 249: | ||
</gallery> | </gallery> | ||
| − | + | Mehr Informationen über PID-Regler sind hier zu finden: | |
[http://www.ardumower.de/index.php/de/forum/anleitungen-hilfe/121-pid-regelung-fuer-drehzahl-drehung-etc-richtig-einstellen Forum]. | [http://www.ardumower.de/index.php/de/forum/anleitungen-hilfe/121-pid-regelung-fuer-drehzahl-drehung-etc-richtig-einstellen Forum]. | ||
| − | |||
| − | |||
| − | |||
= Weiterführende Links = | = Weiterführende Links = | ||
| − | #[http://www.ardumower.de/index.php/en/forum/schleifensensoren-generator/83-ir-bake-generator-empfaenger-diy | + | #[http://www.ardumower.de/index.php/en/forum/schleifensensoren-generator/83-ir-bake-generator-empfaenger-diy Ein anderer Navigationsansatz sind Infrarot-Baken] |
| − | #[http://grauonline.de/wordpress/?page_id=364 | + | #[http://grauonline.de/wordpress/?page_id=364 Mehr Details zum 'matched filter'] |
| − | #[http://www.grauonline.de/alexwww/ardumower/oscilloscope/oscilloscope.html | + | #[http://www.grauonline.de/alexwww/ardumower/oscilloscope/oscilloscope.html Soundkarten-Oszilloskop inklusive 'matched filter'] |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
Aktuelle Version vom 4. Juli 2016, 10:11 Uhr
Inhaltsverzeichnis
Zusammenfassung
Eine Begrenzungsschleife (oder Perimeterdraht) ist eine Art 'elektronischer Zaun': er veranlaßt den ArduMower zum Stoppen / Umkehren sobald die Grenze erreicht ist. Nicht in jeder Umgebung ist eine Begrenzungsschleife notwendig.
Das Prinzip: durch den im Garten verlegten Schleifendraht wird ein Signal gesendet, das der Ardumower ausgewertet. Gebraucht werden ein Sender zur Erzeugung und Übergabe des Signals an die Schleife und ein Empfänger zur Signalauswertung im ArduMower.
Und so wird das Signal empfangen: eine Empfangsspule liefert ein Signal, dessen Stärke je nach Abstand zwischen Schleifendraht und Empfangsspule variiert. Interessanterweise wechselt das Signal in dem Moment seine Polarität, wo der ArduMower (genauer: die Empfänger-Spule) den Schleifendraht überfährt.

Perimeterdraht
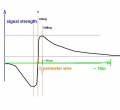
Signalstärke

Verlauf der Signalstärke

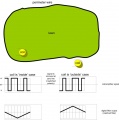
Objekte ausschließen

Flächen aufteilen




Begrenzungsschleife
Dies ist die neue Version von Sender und Empfänger für die Begrenzungsschleife (erhältlich über den shop ![]() ).
).
Beim Überfahren des Schleifendrahtes passiert nun etwas Interessantes: die Polarität der Signalspannung wechselt von negativ auf positiv bzw. umgekehrt - je nachdem, ob man von innen oder außen kommt. Dadurch werden sowohl das Überfahren selbst als auch der Status (Aufenthalt innerhalb oder außerhalb der Schleife) eindeutig erkennbar. Wie bei der V1 nutzen wir zur Signalverstärkung wieder den Motortreiber für das Ausgangssignal und einen Operationsverstärker für das Eingangssignal von der Empfangsspule. Der Sender übergibt eine digitale Signalfolge (auch als 'pseudo-noise' bezeichnet) an die Schleife, die vom Empfänger über einen software-basierten digitalen Matched-Filter ausgewertet wird. Der Filter liefert als Ergebnis einen Peak: positiv - ArduMower innerhalb oder negativ - ArduMower außerhalb der Begrenzungsschleife.
Prinzipablauf Sender:
- Erzeugen des Ausgangssignals durch den Arduino Nano (ca. 3 Khz)
- Verstärkung des Ausgangssignals durch den Motortreiber (MC33926), Schleifendrahtenden anstatt eines Motors an den Ausgang anschließen
Prinzipablauf Empfänger:
- Eingangssignal per Empfangsspule aufnehmen
- Eingangssignal per Operationsverstärker (LM386) verstärken
- ADC sampling durch Arduino Mega (mit 9615 Hz)
- Signalfilterung and Analyse durch ein digitales Filter (software-basierter Matched-Filter-Algorithmus)
- Auswertung des matched filter Ergebnisses (zur Feststellung des Aufenthaltbereiches inner- / außerhalb der Schleife, Schleifenabfahren usw.)
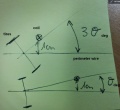
Folgende Bilder erklären den Wechsel der Signalpolarität innerhalb und außerhalb der Schleife. Sie zeigen auch die Richtung der magnetischen Flusslinien, die vom Begrenzungsdraht ausgehen und wie sie die Spule innerhalb und außerhalb der Begrenzungsschleife treffen.
Für ein besseres Verständnis des Filters gibt es den Matched Filter Simulator. Für weitere Informationen zum Filter, schaue Dir auch das Matched Filter Video an. Using a simple symmetric signal (which looks equal on positive and negative side of the zero point), you cannot differentiate between an 'inside perimeter' and 'outside perimeter' signal. When the mower is traversing the perimeter loop, the signal polarity changes (positive becomes negative and negative becomes positive). We want to detect this polarity change of the signal. Using an unsymmetrical signal, you can do this. You can see the difference in the simulator. The default signal (slider 'example signal') is a symmetric signal - press the 'Invert' button to invert the signal (change its polarity). In the correlation result (graph 'Matched filter') the polarity can not be detected. Now use an asymmetrical signal ('pseudonoise5_pw'). Press again 'Invert' to change signal polarity. Now you can see polarity of the signal in the filter output (graph 'Matched filter'). It's the sign of the peak (positive or negative sign).
Innen/außen-Erkennung über den Polaritätswechsel

Flussrichtungen

Perimetersignal an Sender und Empfangsspule

Matched filter

What makes a good/bad signal





Sender


Wir benutzen einen Arduino Nano zur Erzeugung und einen Mototreiber als Ausgangsverstärker des Signals. Der Motortreiber wird mit 3,2 kHz betrieben (2 Impulsbreiten 4808 und 2404 Hz). Unser Motortreiber verfügt über eine integrierte Strombegrenzung und eine Übertemperaturabschaltung (z.B. MC33926)
Anschluss der Induktionsschleife erfolgt am MC33926 zwischen M1OUT1 und M1OUT2.
![]() Wichtig: Die Schleifenlänge kann im Bereich 20 - 450m betragen und muss mindestens 5 Ohm bzw. darf maximal 12 Ohm Widerstand aufweisen. Die maximal Begrenzungs-Fläche beträgt 1000 m2.
Wichtig: Die Schleifenlänge kann im Bereich 20 - 450m betragen und muss mindestens 5 Ohm bzw. darf maximal 12 Ohm Widerstand aufweisen. Die maximal Begrenzungs-Fläche beträgt 1000 m2.
Sendersoftware
Tipp: Wenn Du Dich nie zuvor mit Arduino beschäftigt hast, lies zuerst unsere Einführung 'erste Schritte mit dem Arduino'.
Download: Du findest den Code für den Schleifensender im Ordner 'sender' unter Ardumower Download
![]() Wichtig: Vergewissere Dich, dass die Pin-Konfiguration des Arduino im benutzten Code (sender.ino) mit Deinem Senderaufbau übereinstimmt! Falls Dein Arduino Nano sich nicht flashen lässt, schaue bitte hier für ein Treiber-Downgrade.
Wichtig: Vergewissere Dich, dass die Pin-Konfiguration des Arduino im benutzten Code (sender.ino) mit Deinem Senderaufbau übereinstimmt! Falls Dein Arduino Nano sich nicht flashen lässt, schaue bitte hier für ein Treiber-Downgrade.
Einstellen der Sendeleistung
Zum Einstellen der Sendeleistung wie folgt vorgehen:
![]() Wichtig: Deine Induktionsschleife sollte mindestens ein Widerstand von 12 Ohm aufweisen. Im Idealfall schaltet man ein 12 Ohm (50W) Lastwiderstand in Reihe. So kommt man dann auf ein Gesamtwiderstand der Begrenzungsschleife die im Bereich von ca 12-15 Ohm liegt.
Wichtig: Deine Induktionsschleife sollte mindestens ein Widerstand von 12 Ohm aufweisen. Im Idealfall schaltet man ein 12 Ohm (50W) Lastwiderstand in Reihe. So kommt man dann auf ein Gesamtwiderstand der Begrenzungsschleife die im Bereich von ca 12-15 Ohm liegt.
Die Versorgungsspannung des Motortreibers wird über das Poti des DC/DC-Wandlers zwischen 6.5 bis 12V eingestellt. Die Spannung am DC/DC-Wandler so einstellen, dass nicht mehr als 1 Ampere zum fließen kommt.
Beispiel:
Deine Induktionsschleife hat: 12 Ohm Deine Eingstellte Spannung am DC/DC-Wandler: 8 Volt
Der verbrauchte Strom und die verbrauchte Leistung ist dann:
Strom: I = U / R = 8 Volt / 12 Ohm => 0,7 Ampere Verbrauchte Leistung: P = U * I = 8 Volt * 0,7 Ampere => 5,6 Watt
Hochlastwiderstand: Bei einem Schleifenwiderstand kleiner 5 Ohm kann der Strom nicht weiter reduziert werden, indem man die Spannung runterdreht (unterhalb von ca. 6V arbeitet der Motortreiber nicht mehr richtig). Dann hilft nur noch ein zur Schleife in Reihe geschalteter Hochlastwiderstand. Wichtig: der Hochlastwiderstand muss für die Leistung ausgelegt sein! In dem gezeigten Beispiel mit 12 Ohm sollte man also einen 10 Watt Lastwiderstand verwenden.
Weitere Informationen: [1]
Automatische Schleifensignalabschaltung
Während sich der ArduMower in der Ladestation aufhält, wird das Schleifensignal nicht benötigt und wir können Energie sparen. Zum Erkennen des Ladestatus befindet sich auf dem Sender PCB ein Stromsensor (INA169, 5A) zwischen Ladegerät und Ladeanschlüsse.
Zum Aktivieren dieser Funktion ist "#define USE_CHG_CURRENT" auf 1 zu setzen
#define USE_CHG_CURRENT 1 // use charging current sensor for robot detection? (set to '0' if not connected!)
Sender Diagnose
Die LED auf dem Arduino Nano signalisiert den Senderstatus:
- An: Perimeterschleife ist angeschlossen und arbeitet
- Aus: Perimeterschleife ist geöffnet (oder durch Defekt unterbrochen) und arbeitet nicht
- Blinkt: der ArduMower wird geladen und die Perimeterschleife ist zur Energieeinsparung durch die Software deaktiviert
Bei der Platine "Sender V2" ist dieses Signal am Ausgang "D13" verfügbar und auf die LED "Mover_in_Ladestation" geschaltet.
Um Fehler zu finden bzw. um den Schleifensender besser zu verstehen, öffne mit der Arduino IDE die serielle Konsole (CTRL+SHIFT+M) auf 19200 Baud. Hier ein Beispiel der möglichen Zustände (Roboter in Ladestation/Roboter nicht in Ladestation usw.):
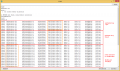
Fehlersuche mit serieller Konsole

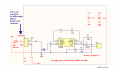
Empfänger

Zum Signalempfang verwenden wir eine Spule (100 mH or 150 mH) in aufrechter Position, in der Mitte am vorderen Rand des ArduMower. Sie ist zur Verstärkung des empfangenen Signals mit dem Eigang eines LM386 Operationsverstärkers verbunden. Auf dem LM386 Modul wird der Kondensator C3 überbrückt, damit der Verstärker ein Signal zwischen 0..5V statt im Standardbereich -5V..+5V) liefert. Der Ausgang des LM386 sollte mit dem Arduino Analog-Pin ('pinPerimeterLeft') verbunden werden. Der Analog-Pin 'pinPerimeterRight' wird bei Verwendung des Senders V2 nicht benötigt.

Position der Perimeterspule

Eine zentrierte, aufrecht montierte Spule
LM386 Modul Schaltplan

NOTE: Perimeterspule/Verstärker von DC/DC-Wandlern fernhalten (Störstrahlung)!
Abstand Spule-Rad: Einfluß auf den Wendekreis (Kurvenwinkel)





Das Empfänger-Kit ist erhältlich im Shop
Achtung: Die Spule muss direkt an den Verstärkermodul angeschlossen werden. So wird die Störfestigkeit des schwachen Spulensignals gegenüber Einflüssen anderer Komponenten (Motore, DC-DC-Wandler) verbessert.
Wichtig: Die aktuelle Software erfordert das Weglassen des Kondensators 4.7nF in Reihe mit der Spule ('differential signal').
Einstellungen

Perimeter settings

At first, activate the perimeter in the Ardumower software (pfodApp->Options->Perimeter Use: YES). It is recommended to keep the default perimeter settings.
The perimeter settings are:
- Timed-out if below smag (timedOutIfBelowSmag) - default setting: 300 | If smag below this value, sender is considered as off (perimeter timeout appears)
- Timeout (s) if not inside (timeOutSecIfNotInside) - default setting: 8
- Trigger timeout (perimeterTriggerTimeout) - default setting: 0 | Perimeter outside trigger timeout when escaping from inside (ms)
- Perimeter out roll time max (perimeterOutRollTimeMax) - default setting: 2000 | Max (random generator) roll time after perimeter out (ms)
- Perimeter out roll time min (perimeterOutRollTimeMin) - default setting: 750 | Min (random generator) roll time after perimeter out (ms)
- Perimeter out reverse time (perimeterOutRevTime) - default setting: 2200 | Time to drive reverse after perimeter out (ms)
- Perimeter tracking roll time (perimeterTrackRollTime) - default setting: 1500 | Hit obstacle while tracking: roll time
- Perimeter tracking reverse time (perimeterTrackRevTime) - default setting: 2200 | Hit obstacle while tracking: reverse time
- Transition timeout (trackingPerimeterTransitionTimeOut) - default setting: 2000 | Max. time required for a in/out transition during tracking, robot will start rotating after this timeout
- Track error timeout (trackingErrorTimeOut) - default setting: 10000 | Max. time required for a in/out transition during tracking, robot will go into error after this time
- Track_P (perimeterPID.Kp) - default setting:51 | Perimeter PID "P" setting
- Track_I (perimeterPID.Ki) - default setting:12.5 | Perimeter PID "I" setting
- Track_D (perimeterPID.Kd) - default setting:0.8 | Perimeter PID "D" setting
- Use differential signal (useDifferentialPerimeterSignal) - default setting: YES | Use differential signal (see signal section)
- Swap coil polarity (swapCoilPolarity) - default setting:NO
- Block inner wheel (trackingBlockInnerWheelWhilePerimeterStruggling) - default setting: YES | robot is wheel-spinning while tracking => roll to get ground again
Abstand Spule/Verstärker zu Motoren
Achte auf die Einhaltung aller Mindestabstände zwischen den folgenden Komponenten:
* Spule zu Radmotor: > 15cm * Spule zu Mähmotor: > 10cm * Spule zu DC-DC Wandler: > 10cm
Achtung: Halte Spule/Vorverstärker von den DC-DC-Wandlern und Motoren fern
Signalmessungen
Sender / Spule / LM386 Verstärker Ausgangssignale sollten etwa so aussehen: (witere Details über das Signal s. Abschnitt Signal)
Signal am Sender und an Empfangsspule und LM386 (Prinzip)
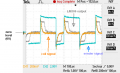
Sender-Signal / Spulensignal (5V sender, 5 Ohm Schleife - blau: Perimeter, gelb: Spule, grau: LM386 Verstärkerausgang)
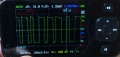
Sendersignal (6.5V, ohne Perimeterschleife)
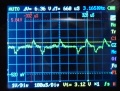
Schleifen-Empfänger: LM386 Ausgang mit DC Störungen



ADC-Kalibrierung am Empfänger
![]() Die ADC-Kalibrierung (bei ausgeschaltetem Sender!) sorgt für eine korrekte Erkennung der Nulllinie (Stille), sodass das empfangene Signal später symmetrisch zur Nulllinie angezeigt wird.
Die ADC-Kalibrierung (bei ausgeschaltetem Sender!) sorgt für eine korrekte Erkennung der Nulllinie (Stille), sodass das empfangene Signal später symmetrisch zur Nulllinie angezeigt wird.
- Der Perimetersender und die Motoren des ArduMower müssen während der Kalibrierung ausgeschaltet sein!
- Wenn eine Störung durch einen anderen Sender nicht zu vermeiden ist, muß während der Kalibrierung die Spule entfernt und der Eingang es LM386 mit GND verbunden werden.
- Führe die ADC-Kalibrierung einmal aus ("pfodApp->ADC Calibration")
Nach der korrekt durchgeführten Kalibrierung sollte das Signal per pfodApp Plot ('sig') bei ausgeschaltetem Perimetersender ungefähr als Null angezeigt werden. Nach Einschalten des Perimetersenders sollte das Signal etwa diesselbe positive wie negative Maximalamplitude ('Symmetie zur Nulllinie') aufweisen.

symmetrisches Signal bei eingeschaltetem Sender (nach ADC-Kalibrierung)
Nullsignal bei ausgeschaltetem Sender (nach ADC-Kalibrierung)

Problemanalyse und Fehlerbehebung am Empfänger
Empfangenes Signal, Filterergebnis und Signalqualität können per Android Handy über die pfodApp->Plot->Perimeter angezeigt werden:

Signal-Rausch-Verhältnis (SNR)

Signal, Filterergebnis, LP Filterergebnis, innen/außen, Ereigniszähler, Signal ein/aus, Signalqualität

Fahren von innen nach außen









Beschreibung der im Plot angezeigten Signalverläufe:
sig: Spulensignal (Sequenz der Rohimpulse nach ADC) als kurzer Snapshot (32 samples), Update alle 20 Sekunden
(also 20 Sekundenwarten bis zum nächsten Snapshot)
mag: Filterergebnis: innen (negativ) oder außen (positiv), magnitude: Abstand zur Perimeterschleife / magnetische Signalstärke (RSSI)
- wird benutzt zum Perimeter verfolgen
smag: Filterergebnis, low-pass-gefiltert, ohne Vorzeichen (geglätteter mag-Verlauf) - verwendet zur Erkennung des 'Sender-aus' Zustandes
Der Grenzwert kann über die pfodApp gesetzt werden (Settings->Perimeter->Timed-out if below smag)
in: binäres Ergebnis des low-pass Filters: innerhalb (1) oder außerhalb (0) der Perimeterschleife - wird benutzt zur Erkennung des Perimetergrenzverlaufs
Ist der ArduMower eine bestimmte Zeit außerhalb der Schleife, geht er in den Fehlerstatus. Diese Zeit kann per pfodApp
(Settings->Perimeter->Timeout (s) if not inside) eingestellt werden
cnt: Anzahl der Wechsel von innen nach außen (counter, Zähler)
on: Perimetersender ist aktiv, Roboter innerhalb und smag ausreichend (1) oder inaktiv/außerhalb/smag zu klein (0)
qty: Signalqualität (Aussage über die Verläßlichkeit der Erkennung 'innerhalb / außerhalb' aus dem Filterergebnis)
Verhältnis aus Vergleich mit Mustersignal zu Vergleich mit inversem Mustersignal
1.0 bedeutet schlechte Qualität, Du solltest Werte von 1.5 oder höher)
Im Plot soll der 'mag'-Verlauf frei von Spitzen sein: innerhalb der Schleife sollte das Signal eine negative Kurve, außerhalb eine positive Kurve beschreiben. Weist die Kurve Spitzen auf, versuche folgende Maßnahmen zur Fehlerbeseitigung bzw. Optimierung:
- Verbinde die Empfangsspule mit 'pinPerimeterLeft' auf dem PCB (am falschen Pin könnte das Signal 'etwas schwach' reinkommen)
- Verringere smag-Mindestwert via 'pfodApp->Options->Perimeter->Timed-out if below smag'
- Die Spulenpolung kann per pfodApp eingestellt werden (wird 'außen' angezeigt, wenn der Ardumower sich innrhalb der Schleife befindet?). Denselben Effekt hat das Umklemmen der Schleifenenden am Senderausgang.
- Sollte das Signal schwach erscheinen, überprüfen, ob am Spulenverstärker das Poti "voll aufgedreht" ist! Hilfreich ist die gleichzeitige Anzeige des Signal per pfodApp (Plot --> Perimeter).
- Die Kabelverbindung zwischen Spule und LM386-Vorverstärker muss möglichst kurz sein - am Besten die Spule direkt am Verstärker anschließen!
- Halte den Abstand zwische Spule und Motoren sowie DC/DC-Wandlern möglichst groß (30cm oder mehr!)
- Nutze die magnetische Abschirmwirkung (z.B. Deines Akkus) zwischen Spule und Störquellen.
Weitere Fehlerquellen: [2]
Videos
- Perimeter2 Demo
- Test 120m Perimeterschleife
- Theorie zu Perimeterschleife und Matched Filter (in deutsch)
- Sender-PCB
- Perimeter Stoptest
- Perimeter Verfolgungstest
- Test zum Finden und Verfolgen mit L50
- Test zum Finden und Verfolgen mit Rotenbach
- Magnetfeld Demovideo
Verfolgung der Begrenzungsschleife
Das Abfahren der Schleife wird über einen softwareseitig realisierten digitalen PID-Regler gesteuert. Die Regler-Parameter (P,I,D) können über ein Android-Handy per pfodApp eingestellt werden.

{kind=link}
Mehr Informationen über PID-Regler sind hier zu finden: Forum.